
au sommaire
Plongez dans l'univers de la pyramide de Khéops grâce à ce dossier. Jean-Pierre Houdin, architectearchitecte et passionné d'égyptologie, interviewé par Michaël Bagot, nous livre les secrets de la constructionconstruction d'un colosse.


La pyramide de Khéops, construite par le vizir Hémiounou, est le tombeautombeau de Khéops, pharaon de la IVe dynastie, fils de Snéfrou.
Cela fait plus de quatre millénaires que ce monstre de 2,6 millions de m3 pesant cinq millions de tonnes, source de nombreux questionnements, est planté sur le plateau de Gizeh, accompagné des pyramides de Khéphren et Mykérinos.
Pyramides : de Saqqara à Khéops
La construction des pyramides en pierre débute à Saqqara, avec le roi Djoser et son architecte Imhotep. D'abord sous forme de degrés (aspect extérieur en escalierescalier) puis sous forme lisse (pyramides à faces lisses), les techniques s'améliorent au fur et à mesure et conduisent Hémiounou à lancer l'extraordinaire pyramide de Khéops, sur le plateau de Gizeh, dont l'énigme de la construction défie l'humanité depuis des millénaires.


Cette montagne de pierre de 136 mètres de haut (146 mètres à l'origine avec son pyramidion) attend en silence que les chercheurs comme Jean-Pierre Houdin répondent enfin au « comment » avec leurs radars thermographiques, leurs gravimètres et autres sondes du troisième millénaire.
Découvrez comment la pyramide de Khéops aurait aussi été construite... de l'intérieur ! Dans ce dossier, nous vous montrerons les outils numériquesnumériques pour étayer cette théorie et les moyens d'étudier la pyramide sur place sans la dégrader. Enfin, nous vous expliquerons pourquoi la pyramide reste un symbole puissant permettant de transmettre un message aux générations futures.
À lire aussi sur Futura :
- Égypte : nouvelles découvertes « majeures » dans la nécropole de Saqqara
- Grandes pyramides : le secret de leur alignement enfin découvert ?
- L'étrange pyramide « ratée » de Snéfrou peut maintenant se visiter
- Pourquoi a-t-on construit les pyramides d'Égypte ?
Construction des pyramides : Khéops et la rampe intérieure
Une rampe interne, des chambres funéraires inexplorées... La pyramide de Khéops, ce polyèdre, n'a pas fini de nous étonner. Si la révélation de Jean-Pierre Houdin est vérifiée, cela résoudrait une des plus grandes énigmes de notre temps.

Le groupe Dassault Systèmes, l'université Laval (Québec, Canada), l'égyptologue Bob Brier et d'autres viennent se greffer sur le projet de Jean-Pierre Houdin.
La science au service de la pyramide de Khéops
Tous ont la même passion : mettre la science au service de la pyramide de Khéops pour révéler ses mystères. Comme l'affirme Jean-Pierre Houdin, « les pierres parlent à ceux qui savent comprendre leur langage, à un architecte par exemple ».
Michaël Bagot : Y a-t-il une rampe intérieure « cachée » dans les dédales de l'une des sept merveilles du monde ?
Jean-Pierre Houdin : Comme je le dis souvent, l'énigme de la construction des pyramides lisses (qui n'est pas une énigme mais le résultat de notre ignorance) est comme un puzzle géant où l'on a d'un côté le cadre et de l'autre les pièces. Personne n'a réussi à mettre toutes les pièces dans le cadre parce que le postulat de départ, construire de l'extérieur, était faux.
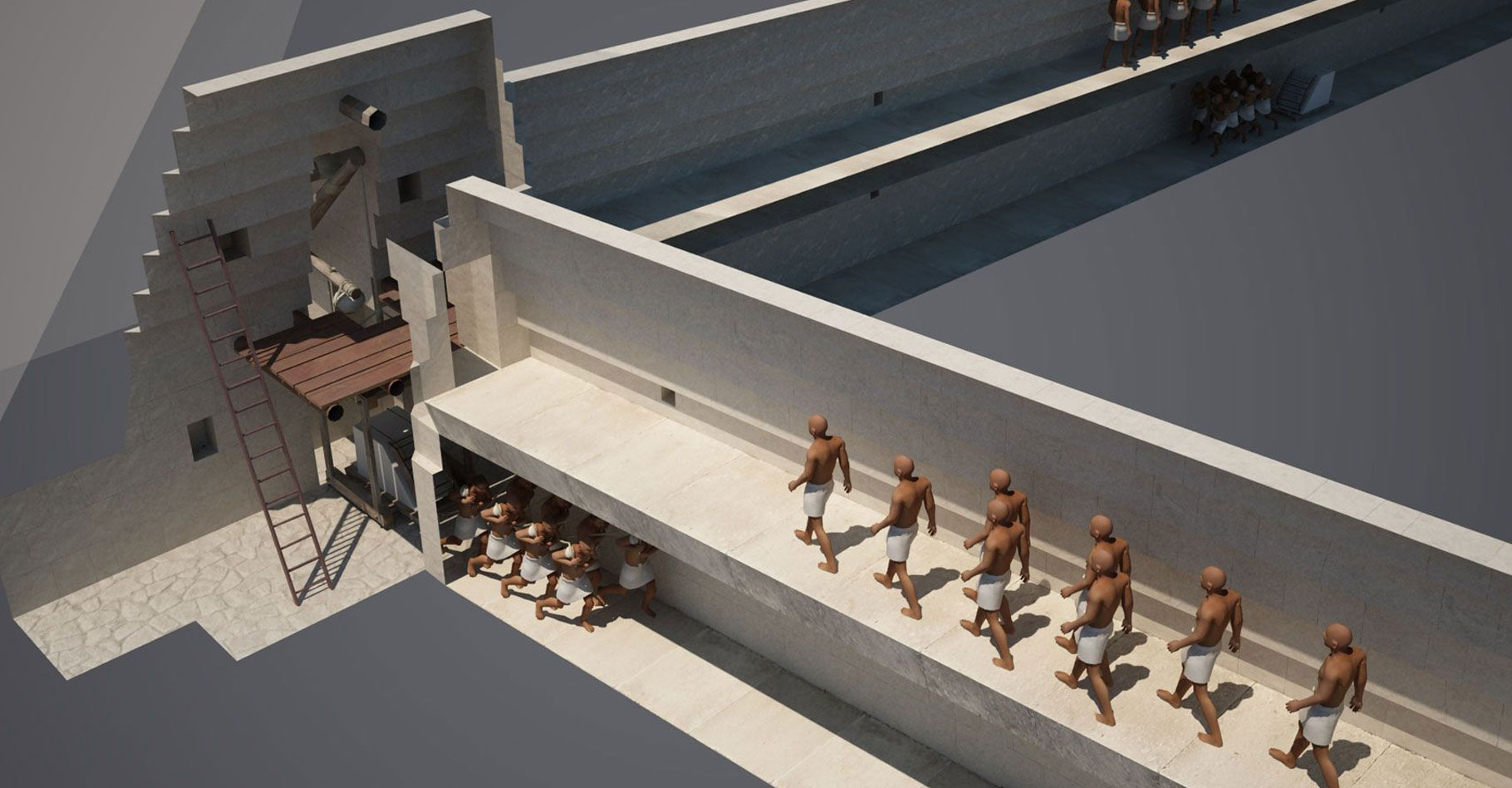
En 1999, mon père a cassé la pensée unique en disant : construire de l'intérieur. Il y a donc une rampe intérieure à découvrir sous les faces de la pyramide de Khéops, car c'est la seule façon de pouvoir la construire « inside out » jusqu'au sommet et de ne gâcher aucun matériau extrait des carrières. « Inside out », c'est construire de l'intérieur en amenant les matériaux dans l'enceinte de la pyramide de la base au sommet et construire les façades terminées en premier, assise après assise, au fur et à mesure de l'élévation.

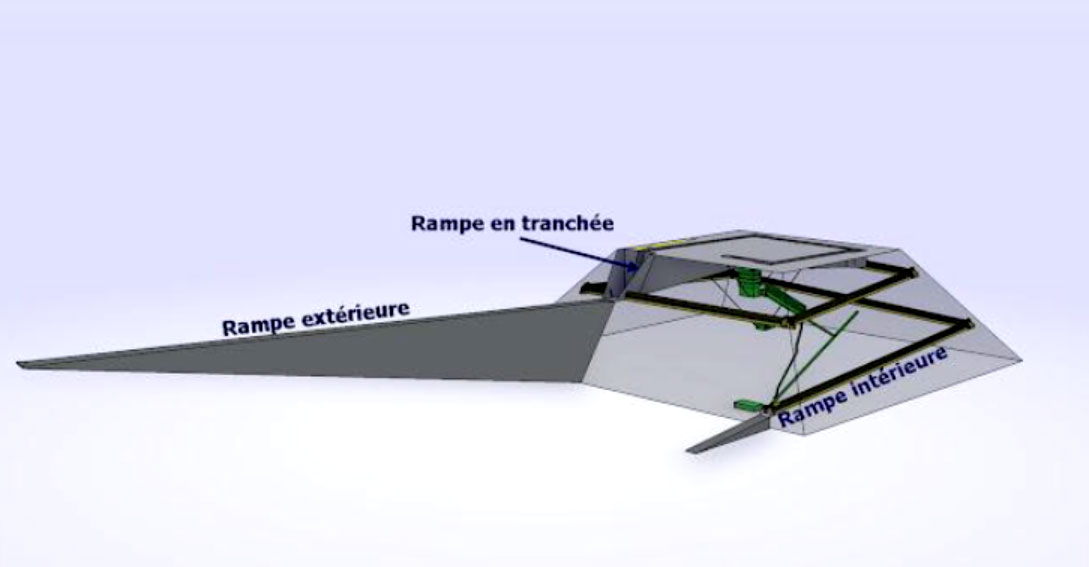
Dans tout volume pyramidal, quelle que soit la pente, il y a deux tiers du volume au tiers de la hauteur. Les Égyptiens l'avaient compris. À mi-hauteur, il y a 85 % du volume. En prolongeant la rampe extérieure en tranchée dans le corps de la pyramide en construction, ils pouvaient presque atteindre la mi-hauteur. La rampe intérieure n'avait plus que 15 à 18 % du volume à alimenter.
Les Égyptiens ont résolu le problème du volume par une rampe extérieure pour toutes les pyramides (ainsi qu'une continuation en tranchée pour les grandes pyramides). Ils ont résolu le problème de la hauteur par une rampe intérieure pour les grandes pyramides suivantes et par une tranchée de construction pour toutes les autres :
- la pyramide rhomboïdale (à Dahchour) : même principe de construction « inside out » que Khéops, avec une rampe extérieure et une rampe intérieure ayant deux formes différentes, une pour la partie basse et une pour la partie haute ;
- la pyramide rouge (à Dahchour) : même principe de construction « inside out » que Khéops, avec une rampe extérieure et une rampe intérieure ayant la même forme que la partie haute de la pyramide rhomboïdale ;


- la pyramide de Khéphren (à Gizeh) : même principe de construction « inside out » que Khéops, avec une rampe extérieure et une rampe intérieure ayant la même forme que celle de Khéops ;


- la pyramide de Meïdoum : même principe de construction « inside out » que Khéops, avec une rampe extérieure et une rampe intérieure ayant la même forme que celle de Khéops (je dois encore confirmer que Meïdoum ait été terminée lisse).
Les deux autres grandes pyramides, Sekhemkhet et Khaba, ayant été stoppées près de la base, il n'y a pas de réponse possible. Toutes les autres pyramides d'Égypte, à partir de Mykérinos, seront construites suivant la technique « inside out » sans la nécessité d'intégrer une rampe intérieure (à cause de leur hauteur). Les Égyptiens utilisèrent alors une tranchée ouverte de construction (restes visibles sur plusieurs sites : Sahourê et Néferirkarê à Abousir).
Michaël Bagot : Et que dire des deux antichambres en complément direct de la chambre du roi ?
Jean-Pierre Houdin : Que c'est dans la logique des appartements funéraires de la IVe dynastie, et que ni la grande galerie, ni la chambre de la reine, ni la chambre souterraine ne peuvent être considérées comme des antichambres.

Michaël Bagot : Pourquoi cette deuxième partie est-elle plus difficile à faire valoir ? Les techniques non invasives sont-elles plus difficiles à mettre en place ? Trop de théories (comme celles de Francine Darmon, Jacques Bardot) tuent-elles votre théorie ?
Jean-Pierre Houdin : La deuxième partie n'est pas du tout plus difficile à faire valoir : j'ai la technique non invasive pour découvrir les antichambres, mais il faut, là encore, une autorisation.
Trop de théories ? Je ne me sens plus dans le contexte d'une théorie, j'explique de A à Z avec des arguments que personne ne peut démonter (personne ne m'a jamais fait une démonstration disant que j'avais tort sur quelque point que ce soit). Je dirais maintenant : prouvez-moi que les Égyptiens n'ont pas construit les pyramides comme je le démontre.
Rampe intérieure de Khéops : origine de la théorie
Il existe depuis HérodoteHérodote (Histoires ou Enquête, rédigé vers 445 avant J.-C.)) de nombreuses explications à la construction de la grande pyramide : système de canalisationcanalisation d'eau avec éclusesécluses à l'intérieur, grues par centaines sur les façades, rampe externe de 146 mètres de haut pour 1,6 km de long, aide des extraterrestres... Malgré cela, les archéologues restent sceptiques, puisque toutes ces théories comportent au moins une anomalieanomalie. Néanmoins, Jean-Pierre Houdin et son père Henri proposent une explication qui n'a pas été réfutée.


L'idée d'une rampe intérieure
L'histoire commence quand le père de Jean-Pierre Houdin, Henri Houdin, est venu présenter son idée de rampe interne sur une simple feuille de brouillon, en y représentant une spirale. Cet ancien ingénieur est pour ainsi dire à l'origine de cette belle aventure. Jean-Pierre Houdin, l'« homme en noir », a su écouter et comprendre la théorie de son père pour y apporter des améliorations.

Il aura fallu la rencontre de Bob Brier pour que Jean-Pierre Houdin trouve une oreille archéologique à son problème, celui de prouver que sa théorie n'en est plus une. Mais le combat risque d'être encore long. Obtenir les autorisations de fouille n'est pas chose aisée ; un spécialiste des momies comme Bob Brier n'est pas un directeur de fouille. Même si, dans l'entourage de Jean-Pierre Houdin ou Bob Brier, certaines personnes peuvent exercer cette mission, elles ont bien souvent un chantier en cours. Or, il est interdit de diriger deux chantiers de fouilles à la fois.
 proposant une autre forme de rampe. À ses côtés, son père, Henri Houdin, à l’origine de la première forme imaginée de la rampe interne, une spirale. © Gedeon Programmes")

Michaël Bagot : Pourquoi avez-vous corrigé la feuille de brouillon de votre père, sur sa proposition de rampe intérieure ?
Jean-Pierre Houdin : En fait, c'est Jean Kérisel, un ami de mon père qui était devenu égyptologue amateur, qui lui avait dit de regarder le 1er janvier 1999 un documentaire de France 2, Le mystère des pyramides, de Jean-François Delassus, avec la participation de François de Closets, dans lequel il était interrogé sur Khéops.
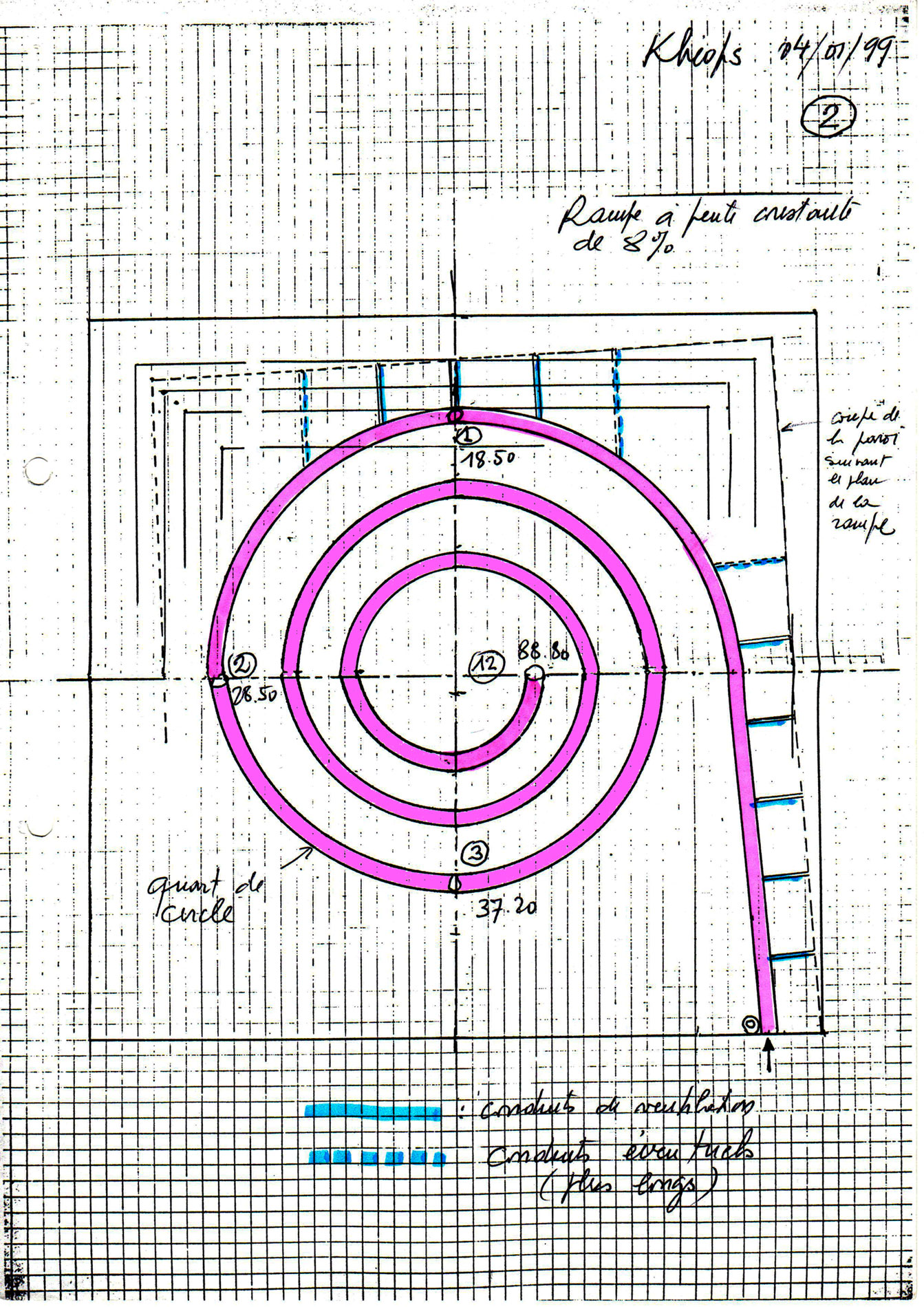
C'est pendant la projection du documentaire que mon père a imaginé : construire de l'intérieur avec une rampe. Quelque temps plus tard, il a montré à Jean Kérisel le croquis avec la rampe circulaire. Jean Kérisel a rigolé en lui disant que les Égyptiens ne connaissaient pas la roue, qu'ils transportaient les blocs sur des traîneaux et donc qu'une rampe circulaire n'était absolument pas adaptée : les traîneaux auraient continuellement frotté dans la courbe et les équipages auraient toujours été de travers.


Mon père est rentré déçu. On a réfléchi, et je lui ai dit que l'on n'avait qu'à « casser » la rampe en sections droites et quarts de tour : cela résolvait ce problème de base. C'est là que j'ai vraiment commencé à me pencher sur le problème, mais le grand saut a eu lieu à l'été 2000, quand on a eu les images de la microgravimétrie...
Quelles étaient les probabilités que cette anomalie microgravimétrique ne montre pas une rampe en spirale ascendante ? On en est arrivé à la conclusion que les probabilités étaient proches de zéro.
Michaël Bagot : Depuis quand savons-nous que les Égyptiens ne connaissaient pas la roue ? En est-on sûr ?
Jean-Pierre Houdin : Pour avoir une roue efficace, il faut un axe solide en ferfer, sinon l'axe casse (surtout pour tirer de lourdes charges). Pour forger le fer, il faut monter en température, avoir des hauts-fourneaux à plus de 1 000 °C et beaucoup de boisbois.
L'Égypte n'est pas un pays de forêts : pas de bois, donc pas de hauts-fourneaux. Les plus hautes températures atteintes permettaient de forger du cuivrecuivre, ce qui n'était pas suffisant pour des axes.


Michaël Bagot : Quel a été l'impact de ces révélations dans le milieu archéologique ? Y a-t-il une forme sectaire de cet univers ?
Jean-Pierre Houdin : Je vous l'ai peut-être déjà dit, Christian Jacq a écrit dans un de ses livres, L'Égypte vue du ciel, l'extrait suivant :
« De nombreuses théories ont été avancées, mais aucune ne résolvait l'ensemble des problèmes techniques. [...] Il aura fallu attendre le début du troisième millénaire pour qu'un architecte, Jean-Pierre Houdin, tombé amoureux de la pyramide de Khéops au point de lui consacrer dix années de recherches, nous procure une solution satisfaisante. La grande pyramide, pourrait-on dire, n'a pas été construite de l'extérieur, mais de l'intérieur, grâce à une rampe interne, une galerie de service en spirale avec des espaces ouverts aux angles de l'édifice. Une seule difficulté : Houdin n'appartient pas au sérail et son exposé froisse nombre de susceptibilités. En dépit d'une démonstration effectuée à l'aide de la 3D numérique, sa découverte peinera à franchir les cercles académiques qui n'en reconnaissent le bien-fondé qu'en privé. »


Michaël Bagot : Comment les autorités égyptiennes ont-elles perçu votre message ? Qui est Bob Brier ?
Jean-Pierre Houdin : Bob Brier est un monsieur très bien, très sympathique, qui, à la base, a un doctorat en physique quantiquephysique quantique, mais qui s'est passionné pour l'Égypte ancienne et a tout chamboulé pour vivre sa passion. Il est devenu « monsieur momie » (Mister Mummy) et est très connu aux États-Unis.

Les autorités égyptiennes pouvaient se résumer à une seule personne depuis plus de quinze ans : le docteur Zahi Hawass.
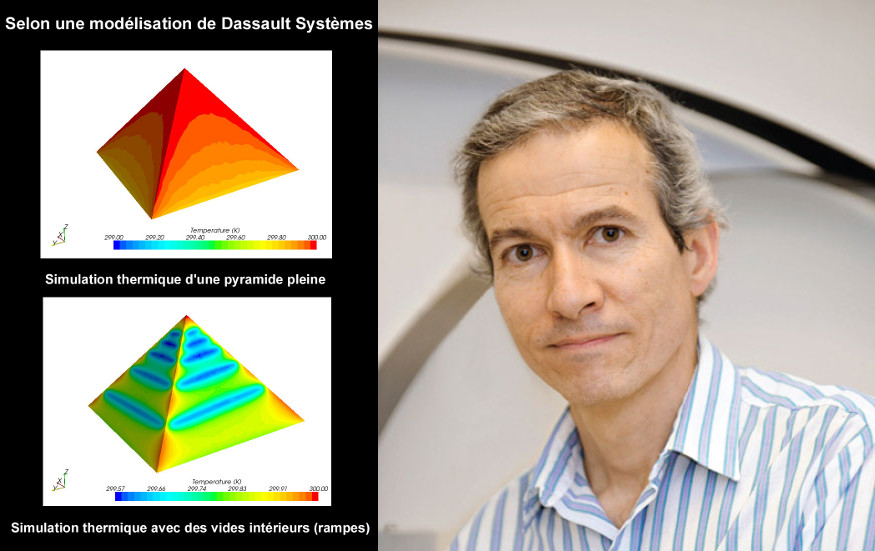
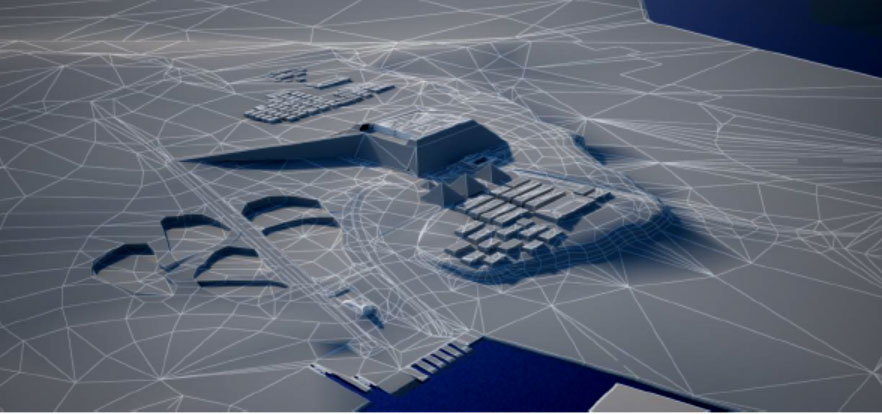
Modélisation en 3D de la pyramide de Khéops
L'étape suivante d'une hypothèse, après avoir posé sur le papier le fondement de la théorie, est de rendre celle-ci vivante et réelle. C'est ce qu'a pu proposer l'équipe de Dassault Systèmes, société spécialisée dans la modélisationmodélisation 3D. Son programme Passion for Innovation a ainsi permis à Jean-Pierre Houdin de mieux tester sa théorie concernant la pyramide de Khéops.


La 3D : un outil extraordinaire
La science en 3D vient apporter sa pierre à l'édifice. Elle permet d'expliquer de manière ludique ce que Jean-Pierre Houdin démontre. Cette méthode a tellement été appréciée que les cours d'archéologie donnés à l'université de Harvard par le professeur Peter Der Manuelian se passent en 3D.
Michaël Bagot : Peut-on parler de la simulation 3D comme d'une technique d'observation non invasive ?
Jean-Pierre Houdin : Ce n'est pas une technique non invasive, c'est le prolongement indispensable de la réflexion, un outil extraordinaire entre soi-même (ce que l'on a dans le cerveau) et ses yeux (qui voient autrement). Et cela a permis de quantifier ce que l'on voit : les distances, les relations spatiales, etc. On est dans la 3D.
 en 2007. © Dassault Systèmes")

Michaël Bagot : Comment vous est venue l'idée de contacter Dassault Systèmes ? Ont-ils mis au point leur logiciellogiciel en fonction de votre demande ? Quel est son nom ?
Jean-Pierre Houdin : J'ai été contacté par Dassault Systèmes, ce qui est complètement différent. À la suite d'une conférence que j'avais donnée à la Société des ingénieurs des arts et métiers, le directeur du programme numérique de PSAPSA, gros client de Dassault Systèmes, qui était dans la salle, a contacté Dassault Systèmes. Il leur a expliqué avoir vu quelqu'un présentant une théorie sur la construction de la pyramide de Khéops avec des images 3D extraordinaires (les miennes, à l'époque ; j'ai plus de 5.000 heures de modélisation 3D à mon actif) et qu'avec leurs logiciels, je pourrais aller beaucoup plus loin. C'est comme cela que Mehdi Tayoubi, Richard Breitner et moi nous sommes rencontrés. Plusieurs logiciels nous ont servis, et nous servent encore : Catia, Delmia, Simulia, 3DVia et d'autres.
Michaël Bagot : Le logiciel Catia de Dassault Systèmes a-t-il été amélioré depuis votre théorie ?
Jean-Pierre Houdin : Ils en sont à la version 6 de Catia, la Ferrari des Ferrari. Dassault Systèmes améliore ses logiciels constamment et c'est extraordinaire. En ce moment, je travaille avec un ingénieur Catia sur la pyramide rouge. Ce qui est formidable quand la structure de conception est bien faite, c'est que si l'on change un seul paramètre (par exemple la pente d'une rampe), tout se modifie automatiquement. On gagne un temps fou et ça permet de réfléchir plus vite, plus loin et en temps réel.


Michaël Bagot : À quoi cela a-t-il pu vous servir ? A-t-il influencé ou modifié votre travail ?
Jean-Pierre Houdin : Je suis passé de la 2 CV à la Ferrari, tout simplement ; 70 % des voituresvoitures conçues dans le monde le sont avec leurs logiciels. Pas besoin de dire à quel point cela a influencé et modifié mon travail.
Michaël Bagot : À quel point cette simulation est-elle fiable (prise en compte du poids, de la duréedurée de vie des matériaux, etc.) ? Quelles sont ses limites ?
Jean-Pierre Houdin : Modéliser un avion ou une pyramide, c'est pareil : on prend tout en compte, on est dans le virtuel, la réalité virtuelleréalité virtuelle. Il y a le mot « réalité » dedans, c'est exactement identique au réel. Dassault Aviation, client de Dassault Systèmes, n'a pas fait de prototype physique pour le Falcon 7X, juste une maquette numérique. Le premier avion construit a été directement vendu ! C'est le futur dans nos projets.
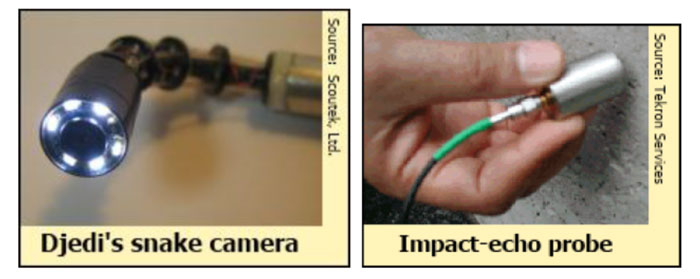
Djedi, le petit robot parti explorer Khéops (technique non destructive)
Le principe des techniques non destructives est, comme leur nom l'indique, de ne pas détériorer l'édifice. C'est un peu le principe d'une échographieéchographie. Les instruments utilisés pour ausculter la pyramide de Khéops sont le microgravimètre et le radar spectroscopique à infrarougeinfrarouge, pour ne citer qu'eux (voir page suivante). Un outil, le robotrobot Djedi, est déjà dans la place.


Mickaël Bagot : Nous arrivons au prolongement de l'étape de simulation, celle des techniques non invasives. Pouvez-vous nous en parler ?
Jean-Pierre Houdin : Pour les techniques non invasives, j'ai étudié le problème depuis 2001 et j'ai fait un premier résumé pour le congrès des égyptologues de Grenoble en septembre 2004. J'ai également fait un dossier pour une demande de mission en 2005 (c'est-à-dire juste avant ma rencontre avec Dassault Systèmes) pour les techniques étudiées (avec les CV des participants) : cela faisait un dossier de 250 pages qui est resté bloqué à la porteporte du Conseil suprême des antiquités égyptiennes.
En 2006-2007, avec la société Thales, nous avons fait des expériences sur site pour tester un nouveau type de radar : une semaine dans les sous-sols et douves du château de Coucy, dans l'Aisne (château en calcairecalcaire du XIIIe siècle détruit par les Allemands à la fin de la première guerre mondiale), et une semaine dans une tour du château de Pierrefonds, dans l'Oise (château en calcaire restauré par Eugène Viollet-le-Duc).
Nous connaissons les limites de ce type de technique au-delà de cinq mètres d'épaisseur de pierre : il devient alors très difficile de détecter du vide. La collaboration sur l'infrarouge avec Dassault Systèmes (simulations) et l'université Laval (qualification des techniques infrarouges à mettre en œuvre et préparation de mission) a débuté en 2010.
 et Dassault Systèmes. © DR")
Le projet d'un robot non invasif
Mickaël Bagot : Une technique non invasive a consisté à concevoir un petit robot en collaboration avec l'université de Leeds (Royaume-Uni) et Dassault Systèmes. Comment ont-ils conçu ce robot ? Sur quelles bases ? Et pour quelle utilité ?
Jean-Pierre Houdin : Le robot Djedi est un outil conçu avec le logiciel SolidWorks. Shaun Whitehead, le concepteur du robot, m'a contacté un jour après avoir vu le documentaire Unlocking the Great Pyramid de National Geographic Channel et la BBC. Il voulait me rencontrer pour avoir des conseils. Je l'ai fait venir à Paris et je l'ai présenté à Dassault Systèmes. Ils ont conclu un partenariat avec Leeds pour pouvoir soutenir le projet (hébergé par cette université). Shaun Whitehead a travaillé avec la Nasa sur les rovers de Mars, donc il sait comment faire des petits robots très performants. Pour Dassault Systèmes, le projet dans la chambre de la reine est très important.

Mickaël Bagot : Quelles sont ses limites ? Ce robot peut-il être équipé d'un petit détecteur infrarouge ou un autre outil de spectroscopie ? Y a-t-il des améliorations possibles dans le futur ? Peut-il percer le « cœur de l'Égypte » dans le conduit pour y glisser une caméra optique s'il détecte une anomalie thermique ? Peut-il avoir des « oreilles » et percuter les bords du conduit pour détecter des changements de son (principe utilisé dans la chambre du roi pour détecter la pierre menant aux deux antichambres) ?
Jean-Pierre Houdin : On est dans la place, c'est tout ce que je peux vous dire.


Mickaël Bagot : Le robot Djedi conçu pour l'exploration de la grande pyramide de Khéops a-t-il des fonctions créées spécifiquement pour cette recherche ? Que lui manque-t-il pour être le plus performant possible ?
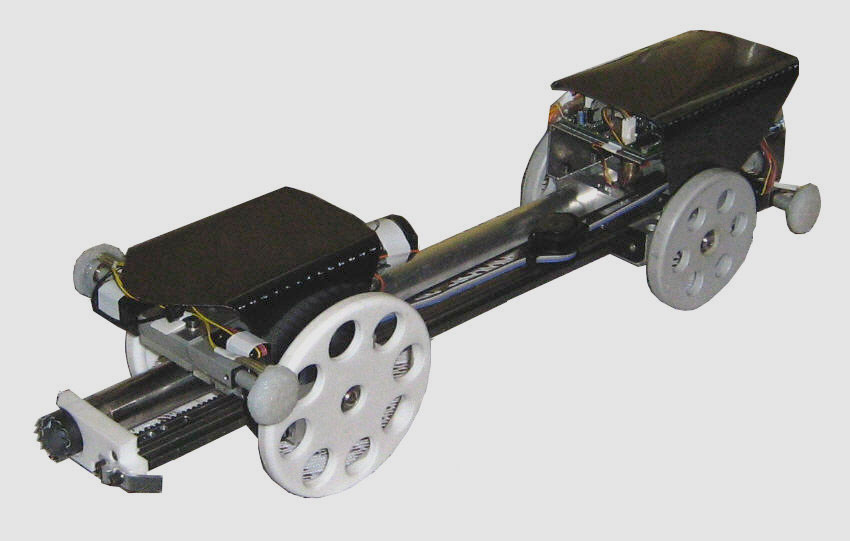
Jean-Pierre Houdin : En fait, ils ont conçu et construit trois robots différents. Le dernier a une « remorque » et est monté plusieurs fois en haut du conduit. Il est en carbonecarbone et équipé de tout ce qu'il faut.

Il est surtout non invasifinvasif, car il ne frotte pas contre les parois (contrairement aux précédents qui étaient équipés de chenilles). Celui-ci se déplace en se rétractant et en s'étirant, se bloquant contre les mursmurs du conduit avec des patins extensibles.
La spectrométrie et la microgravimétrie pour révéler les secrets des pyramides
Pour analyser finement la pyramide de Khéops, outre les robots comme Djedi (voir page précédente), les chercheurs disposent d'analyses spectroscopiques et de l'analyse microgravimétrique. Jean-Pierre Houdin explique leur usage dans le cadre de ses recherches.


Avec le procédé de microgravimétrie, en relevant l'intensité de force engendrée dans deux portions similaires mais à des endroits différents de la pyramide, il est possible de repérer des anomalies dans la massemasse et, de ce fait, d'en déduire la présence d'une cavité, d'une chambre, d'un couloir...
Mesurer à l'aide d'un microgravimètre
Dans le livre Le Secret de la grande pyramide, écrit par Jean-Pierre Houdin et Bob Brier, les auteurs expliquent que « toute masse exerce une force d'attraction ; on peut mesurer la valeur de l'attraction exercée par des blocs de la pyramide en se servant d'un appareil très sensible appelé microgravimètre. Son principe : détecter de minuscules anomalies gravitationnelles dans la pyramide pour y découvrir des espaces cachés éventuels ».
Mickaël Bagot : Pour vérifier vos hypothèses, une autre technique existe, celle de l'analyse spectroscopique. En quoi consiste cette technique ?
Jean-Pierre Houdin : Pour moi, un spectroscope permet d'avoir un spectrespectre de quelque chose de thermique par exemple, ou en couleurcouleur...
Mickaël Bagot : L'analyse infrarouge thermique dite « vision infrarouge multipolaire » est à l'étude à l'université Laval, à Québec. Pouvez-vous nous en dire deux mots ? Les chercheurs ont-ils rencontré des problèmes ? Ont-ils trouvé un moyen efficace pour analyser une masse aussi énorme que celle d'une pyramide ?
Jean-Pierre Houdin : Pour l'instant, je ne peux pas parler à la place de Laval. Les choses sont en cours.
 et une pyramide qui contient une rampe intérieure (en bas). Pour Xavier Maldague (à droite), titulaire de la chaire de recherche en vision infrarouge multipolaire à l’université Laval, <em>« les techniques que nous utiliserons pour sonder l’intérieur de la pyramide sont non destructives »</em>. © Dassault Systèmes, DR")
Mickaël Bagot : Des analyses microgravimétriques effectuées dans les années 1980 par EDF ont relevé des anomalies (peut-être une rampe). De nouveaux tests seront-ils d'une meilleure qualité ?
Jean-Pierre Houdin : Les nouveaux tests seront de bien meilleure qualité ; ils viendront confirmer par une seconde technique non invasive ce qu'une première a montré avec les différences de température sur une longue période de temps.
Mickaël Bagot : Existe-t-il d'autres techniques adaptées à cette étude ? Sont-elles en cours d'utilisation, et où ?
Jean-Pierre Houdin : Oui, une technique qui permettrait de visionner tous les éléments, rampe intérieure et antichambres, en une seule fois. Je travaille dessus depuis plus de six mois mais c'est ultraconfidentiel.
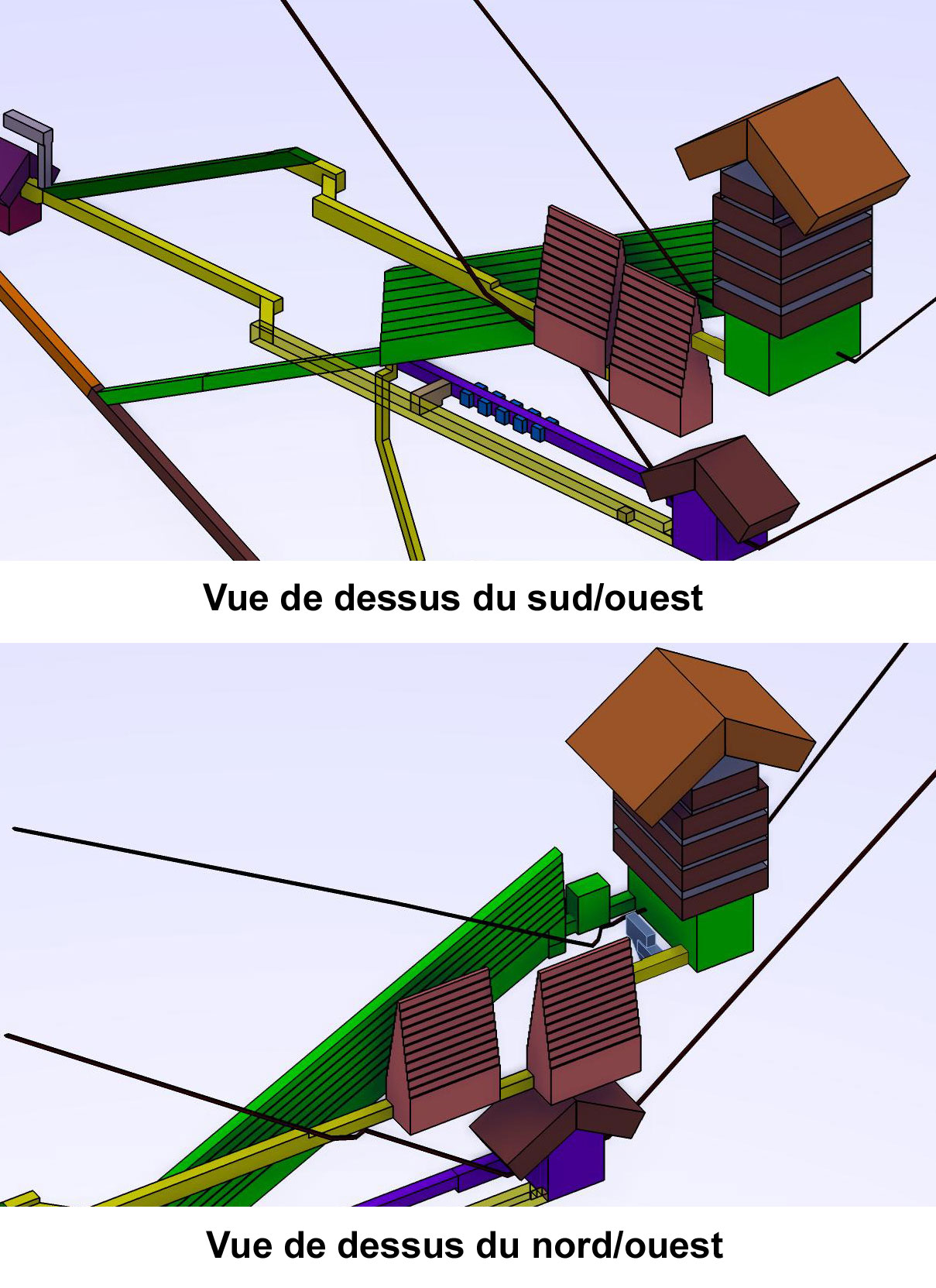
 est parallèle à la face est, et monte jusqu’à la première chambre que Bob Brier a explorée dans le coin nord-est. La deuxième section et la troisième section (en blanc) montent en biais, car elles épousent la pente de la pyramide inclinée vers l'intérieur. La quatrième section, située à 43 m de hauteur (en jaune), est horizontale et parallèle à la face sud. Les 14 sections suivantes (en blanc) montent en biais jusqu'au sommet. La chambre que Bob Brier a explorée est entourée d'un cercle jaune. © Jean-Pierre Houdin, fondation EDF")

Mickaël Bagot : Les analyses spectroscopiques testées sur un modèle semblable aux pyramides ont-elles contribué à revoir des bases de conception au bureau d'études (amélioration physique, électronique, etc.) ? Si oui, lesquelles ? Le modèle utilisé pour les essais a-t-il une différence majeure avec la pyramide ?
Jean-Pierre Houdin : On a appris de nouvelles choses liées à la « masse ». Des essais faits en laboratoire ne peuvent pas refléter la réalité à cause de l'effet de masse d'une pyramide. Les simulations numériques peuvent être plus instructives que des essais en laboratoire sur des maquettes à petite échelle ; le facteur échelle peut avoir une forte importance pour l'infrarouge par exemple.
Mickaël Bagot : Les nouvelles techniques de détection non invasives se trouvent aussi dans les satellites. Un œilœil stationnant à 700 km de haut permet de repérer des objets de moins d'un mètre de diamètre, et surtout de faire de l'analyse d'imagerie infrarouge. Sarah Parcak, de l'université de l'Alabama, à Birmingham, a découvert ainsi plus de 1.000 tombes et 3.000 sites de monuments antiques (à noter une cinquantaine de bateaux trouvés par Diego Baratono et le professeur Paolo Trivero par cette méthode).
Jean-Pierre Houdin : C'est un problème d'échelle ; la résolutionrésolution des satellites infrarouges (civils) n'est pas suffisante dans le cas de la pyramide. Sarah Parcak et Diego Baratono « découvrent » des masses de matériaux différents du sol qui sont déjà conséquentes.
Mickaël Bagot : D'où ma question, la science peut-elle détecter une rampe intérieure dans une pyramide à partir d'une analyse d'imagerie infrarouge prise par satellite ?
Jean-Pierre Houdin : Non, cela est impossible.
Le savoir de l'Égypte ancienne à la Géode, à Paris
Durant l'Antiquité égyptienne, rentrer dans une « maison de vie » signifiait en sortir vingt ans après. On y apprenait à écrire, lire, construire, devenir scribe, prêtre ou vizir de père en fils. Le savoir y était enseigné de manière sectaire. Une partie de ce savoir était visible à la GéodeGéode de la Cité des sciences, à Paris, en 2007.


Pour les curieux qui osaient mettre les pieds dans une maison de vie sans y être conviés, les prêtres se mettaient alors à divulguer des informations erronées à leurs élèves de façon à perturber les non-initiés, et ce jusqu'à ce qu'ils partent.
Un savoir bien gardé
Très peu de choses de ce savoir oral étaient transcrites directement sur papyrus. C'est peut-être une des raisons pour lesquelles aucune trace de plan de pyramide n'est attestée dans les archives.
Il faudra attendre bien des millénaires pour dévoiler à nouveau cette science. C'est dans la boule futuriste de la Géode de la Cité des sciences, à Paris, que Jean-Pierre Houdin et l'équipe de Dassault Systèmes proposèrent en 2007 une forme de « plan de la pyramide ». Celui-ci n'utilisait pas un support papyrus ou un ostracon, mais un support numérique, et en 3D !


Michaël Bagot : « Khéops révélé » à la Géode, c'était un projet pharaonique ! Comment avez-vous pu mettre cela en place ? Quels sont les acteurs importants pour la mise en place de cette diffusiondiffusion ? Combien de temps a-t-il fallu pour réaliser ce projet ?
Jean-Pierre Houdin : Je suis parti de rien et j'ai tout construit à la force du poignet depuis mi-2000. Puis, il y a eu la création de l'ACGP, l'association qui m'a soutenu depuis 2005. C'est moi qui suis allé chercher les mécènes, les uns après les autres, avec mon petit ordinateurordinateur et mes images 3D. Ensuite, il y a eu les documentaires, les livres, donc les droits d'auteur. Je ne suis pas riche, mais je vis une vraie passion. Je me suis fixé un challenge : expliquer la construction des grandes pyramides !
Michaël Bagot : Comment avez-vous considéré qu'il y avait une « école d'architecture » de la IVe dynastie ?
Jean-Pierre Houdin : Parce que je suis architecte, et que pour les pyramides de la IVe dynastie, c'est évident ! Je fais de la rétro-ingénierierétro-ingénierie en remontant dans le temps avec Khéops, la pyramide rouge, la pyramide rhomboïdale, etc. En remontant ainsi à contresens des évolutions, je découvre beaucoup de choses.
Michaël Bagot : Que peut-on retenir sur les approches techniques des Égyptiens et le savoir qu'ils possédaient en matièrematière de géométrie, de résistancerésistance des matériaux, d'architecture, de méthodes ? Et en quoi peuvent-ils nous servir aujourd'hui ?
Jean-Pierre Houdin : Les Égyptiens ont implanté les pyramides sur le plateau de Gizeh en fonction d'une contrainte principale : la meilleure implantation des unes et des autres en fonction de la topographie. Le domaine des topographestopographes de l'époque, c'était la vue depuis la vallée du Nil, les pentes naturelles et les accès. Les carrières étaient du domaine des géologuesgéologues. Les architectes, ingénieurs, géomètresgéomètres, analystes, planificateurs, logisticiens, gestionnaires de chantier, économistes, etc. s'occupaient des chantiers.

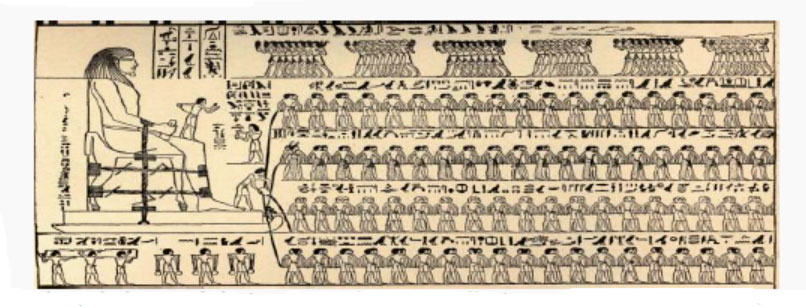
Michaël Bagot : S'entendaient-ils bien sur le chantier ?
Jean-Pierre Houdin : Il est écrit sur un papyruspapyrus : « Parmi eux, l'ancien s'appuyait sur le garçon, le puissant soutenait le trembleur. Le cœur s'enthousiasma, leurs bras prirent de la force » (extrait du livre Le Secret de la grande pyramide, p. 115). On peut donc imaginer l'entente cordiale et solidaire régnant sur le plateau de Gizeh au service du pharaon, vu comme un dieu vivant.
")
Michaël Bagot : Avons-nous encore des choses à apprendre d'eux qui pourraient nous servir à l'avenir ?
Jean-Pierre Houdin : La simplicité pour arriver à un résultat extraordinaire et la logique comme état d'esprit.
Biographie de Jean-Pierre Houdin, l'homme en noir des pyramides
Jean-Pierre Houdin naît à Paris en 1951 d'un père ingénieur, Henri Houdin, diplômé de l'École nationale supérieure d'arts et métiers de Paris, et d'une mère médecin, Renée Mésana. Il est le cadet d'une famille installée depuis 1950 à Abidjan, en Côte d'Ivoire.


Dans le cadre de son métier d'ingénieur, Henri Houdin avait pour mission de développer les infrastructures, ponts, routes ou encore barrages d'un pays qui faisait partie, à l'époque, de l'Afrique-Occidentale française. Quant à Renée Mésana, son travail consistait à soigner les ouvriers malades ou blessés au sein de la société de son mari, ainsi que les villageois dans les dispensaires de brousse. On doit notamment à M. Houdin « père » les deux grands ponts d'Abidjan, le pont Félix-Houphouët-Boigny et le pont Charles-de-Gaulle.
Retour de la famille Houdin à Paris
La vie poursuit son cours et, au moment de l'indépendance de la Côte d'Ivoire en 1962, toute la famille se réinstalle à Paris, où Renée se spécialise en médecine du travail : elle est l'une des premières à alerter l'opinion publique sur les risques de l'amiante. Quant à Henri, il réalise de nombreux projets de génie civil à travers le monde : Grèce, Guyane, Nouvelle-Calédonie, Polynésie, mer du Nordmer du Nord. Pour le cadet de la famille, la carrière d'architecte représente, à l'époque, la voie à suivre la plus logique et la plus stimulante.

À 19 ans, Jean-Pierre Houdin entreprend des études à l'École nationale supérieure des beaux-arts, tout en travaillant à temps partiel dans une agence d'architecte. Son projet avant-gardiste de maison solaire lui permet d'obtenir son diplôme, puis de s'envoler pour la Côte d'Ivoire afin de proposer au gouvernement de se mettre au solaire. Malheureusement, cela n'ira pas plus loin. Plus tard, Jean-Pierre développe sa propre agence à Paris, en compagnie de son épouse Michelle, une artiste au goût prononcé pour l'art contemporain.
L'esprit d'entreprise du couple ne fait qu'éclore : aidés de leur ami ingénieur, Laurent, ils achètent une boulangerie, puis ils créent un café-galerie d'art, Les Enfants Gâtés, dans un stylestyle colonial 1920. Le succès du concept est au rendez-vous, tandis qu'au sous-sol, la Galerie 43 expose à titre gracieux une cinquantaine de jeunes artistes en une dizaine d'années.
Année sabbatique à New York
L'automneautomne 1996, année sabbatique pour eux, est un tournant dans leur vie : ils s'envolent pour New York après avoir vendu leur café-galerie d'art. Là-bas, Jean-Pierre se découvre de nouvelles passions : l'informatique et le Web, tout en observant et s'inspirant de l'architecture de la ville. Quant à Michelle, c'est la visite de plus de 20 galeries d'art par semaine qui rythme ses journées.
Après avoir épuisé leurs économies aux États-Unis, et s'être rendus dans les plus beaux sites naturels et architecturaux (le barrage Hoover dans le Colorado, San Francisco, etc.), ils retournent à Paris pour vendre ce qu'il leur restait, et vivre ainsi en mode « nomade », avec pour métier la création de sites Web, et comme petit plaisir une coupe de champagne tous les soirs.
Pour connaître l'histoire de la nouvelle passion de « l'homme en noir », il faut creuser du côté de deux grands bâtisseurs, Henri Houdin et Jean Kérisel, et d'un croquis qui nous révélera bien des secrets (voir page 3 de ce dossier).

Michaël Bagot : Vous avez écrit plusieurs livres relatant vos recherches. Pouvez-vous nous en parler ? Peut-on considérer la logique et le savoir comme une technique de découverte non invasive ?
Jean-Pierre Houdin : Mes livres sont des « étapes » dans l'avancement de mes recherches. Une théorie ne peut pas être fixée une fois pour toutes ; elle évolue au fur et à mesure que l'on apprend, découvre des choses. Mon but est d'arriver à rendre la théorie, ou plutôt maintenant mes explications, comme les seules possibles, et je cherche toujours à simplifier, écrémer comme je dis, pour ne garder que l'essentiel, ce qui est le plus réaliste au regard des connaissances de l'époque. Simplifier, c'est ce qu'il y a de plus dur à atteindre.
L'important, c'est d'avoir un point de départpoint de départ. Le problème de la construction des grandes pyramides était comme une grosse pelote de laine dont personne ne trouvait l'une des extrémités du fil. En disant « de l'intérieur », mon père a sorti une extrémité, et depuis je déroule. Il ne reste pratiquement plus de pelote, juste un très long fil où tout se suit, est cohérent. Mais en douze ans, j'ai beaucoup appris au niveau de l'ancienne Égypte, et je pourrais avoir un doctorat en égyptologie.
Le savoir et la logique sont des éléments indispensables dans ce type de démarche. Cela ne fait pas une découverte, mais amène à une découverte.
Michaël Bagot : Depuis combien de temps êtes-vous devenu le « nouvel Hémiounou », l'architecte de Khéops ? L'Égypte a-t-elle été depuis longtemps une source d'inspiration pour vous ?
Jean-Pierre Houdin : Peut-être depuis le 30 mars 2007, après la première conférence de presse à la Géode. L'Égypte m'est tombée dessus en janvier 1999.


Michaël Bagot : Si les autorisations ne sont toujours pas d'actualité, un mode moins conventionnel est-il envisageable ?
Jean-Pierre Houdin : Question à 100 000 dollars.
Michaël Bagot : Quel est l'avenir des techniques non invasives ? Quelles sont les nouvelles pistes ou améliorations ? Rayons XRayons X, analyse aux neutronsneutrons (permet de révéler les matières premières utilisées, les techniques de fabrication, le développement historique d'alliagesalliages et de matériaux composites, les origines géologiques des mineraisminerais et de l'argileargile)...
Jean-Pierre Houdin : La science fait des progrès tous les jours, et avec la loi de Mooreloi de Moore (ou conjectures de Moore), cela accélère ; le temps travaille pour moi.
Michaël Bagot : Comment se déroulent les financements de ces opérations (Géode, Djedi, etc.) ?
Jean-Pierre Houdin : Pas de problème de ce côté-là, puisque les techniques deviennent de plus en plus « légères ». Et le projet Khéops est bien demandé.
Le projet Earth Pyramid
Le projet Earth Pyramid a pour vocation d'être un point focal pour apprendre des pays du monde, et voir comment nos actions et nos inactions d'aujourd'hui peuvent affecter le futur. Jean-Pierre Houdin fait partie de ce projet.


Michaël Bagot : Dites-nous quelques mots à propos de Steve Ward et de son projet Earth Pyramid auquel vous vous êtes associé.
Jean-Pierre Houdin : Steve Ward m'a contacté pour deux raisons : mon savoir-faire pour mener à bien un projet et ma « renommée » dans le domaine des pyramides. Mais aussi pour mon principe de construction totalement écologique et économique en matériaux, puisqu'on ne gâche rien.
Steve est un passionné qui défend un projet hautement pacifique et chargé de symboles. Le projet Earth Pyramid, initié par la famille Ward, mérite une grande attention et du respect. Il est extrêmement encourageant de voir de tels projets.
Au début des années 1970, deux véhicules spatiaux, Pioneer 10 et 11, s'envolaient avec à leur bord deux disques résumant la vie sur notre Planète, dans l'espoir que certaines « personnes inconnues » obtiendraient, en 40 000 années, quelques informations sur nous.


Pourquoi construire une pyramide ?
Quel monument pourrait être le meilleur symbole de durée, 4 500 années plus tard, sinon une pyramide ? Parmi les sept merveilles du monde, figure la pyramide de Khéops en Égypte, qui témoigne d'une civilisation ayant mis très haut la barre de la connaissance, des compétences dans l'art et le développement. Le secret de sa construction a été perdu parce qu'aucun texte, dessin ou explication n'a été scellé dans son cœur ni retrouvé à ce jour. La construction de la pyramide de Leeds devrait également être l'occasion, au travers des réalisations des anciens Égyptiens, de nous aider à construire ce monument en utilisant les processus, les outils et les matériaux respectant notre environnement.
L'idée du projet de la pyramide de Leeds serait de mettre dans une chambre appelée symboliquement la « capsule du temps », construite au centre de la pyramide, les noms et les messages de millions d'enfants du monde entier.
Ce geste symbolique sera un puissant rappel du fait que nous vivons tous ensemble sur une petite planètepetite planète au milieu de l'espace. Nous devons prendre soin de notre Planète, de ses habitants. Seuls les enfants, avec leur innocence et leurs rêves, peuvent faire de ce projet un succès. Nous avons, nous, les adultes, un devoir de responsabilité pour soutenir et construire ce projet.
Nous espérons que dans 1 000 ans, environ 50 générations à partir de maintenant, les hommes lèveront les scellés et qu'une partie de notre humanité sera en mesure d'étudier une fraction de son histoire à travers l'identité de ces enfants et leurs messages.

par Michaël Bagot

















 vient de lancer la compagne « Les records à ne pas battre » pour sensibiliser à l’urgence climatique et à la dégradation de la biodiversité. © Image générée par l’IA Adobe Firefly")
 forment une très vaste famille de coléoptères comprenant plus de 37 000 espèces connues, réparties en 2 500 genres. Même s'il est impossible de le dire en regardant cette image, prise par en dessous, les chrysomèles ont souvent un dos métallisé très coloré. © Chuck Daghlian/Louisa Howard, domaine public")



