

au sommaire
Lancée le 4 août 2007 par une fuséefusée DeltaDelta II depuis Cap Canaveral, la sonde américaine Phoenix Mars Lander s'est posée le 25 mai 2008 à 00 h 33 TU à proximité du cercle arctiquearctique martien afin d'y rechercher des traces d'eau et d'éventuelles présences de vie présente ou passée. Cette sonde immobile est un simple atterrisseur incapable de se déplacer. Toutefois, la NASA l'a pourvu d'un long bras robotisé capable de creuser dans le sol glacé pour prélever et placer des échantillons du sol vers les instruments d'analyse qui seront installés sur la plate-forme, et en fait le premier véritable laboratoire biochimique jamais envoyé sur la Planète rouge.
Phoenix doit fonctionner au moins une année martienne (environ 2 années terrestres). Elle concentrera ses efforts au-dessus des sites où Mars OdysseyMars Odyssey a détecté de vastes concentrations de glace. Elle creusera le sol à la recherche d'éléments volatils (matières organiques) récemment générés et sera capable de détecter des formes de 10 nanomètres. Ses instruments scientifiques lui permettront également d'analyser la roche et l'atmosphèreatmosphère martiennes.
L'atterrisseur de Phoenix a été élaboré autour de la plate-forme initialement prévue pour Mars Surveyor 2001, abandonnée suite à l'échec de Mars Polar LanderMars Polar Lander en 2001 et dont il reprend les caractéristiques essentielles ainsi qu'une grande partie de l'instrumentation. D'une masse de 55 kilogrammeskilogrammes, il présente un diamètre de 1,50 mètre, pour 5,50 mètres d'envergure panneaux solaires entièrement déployés.

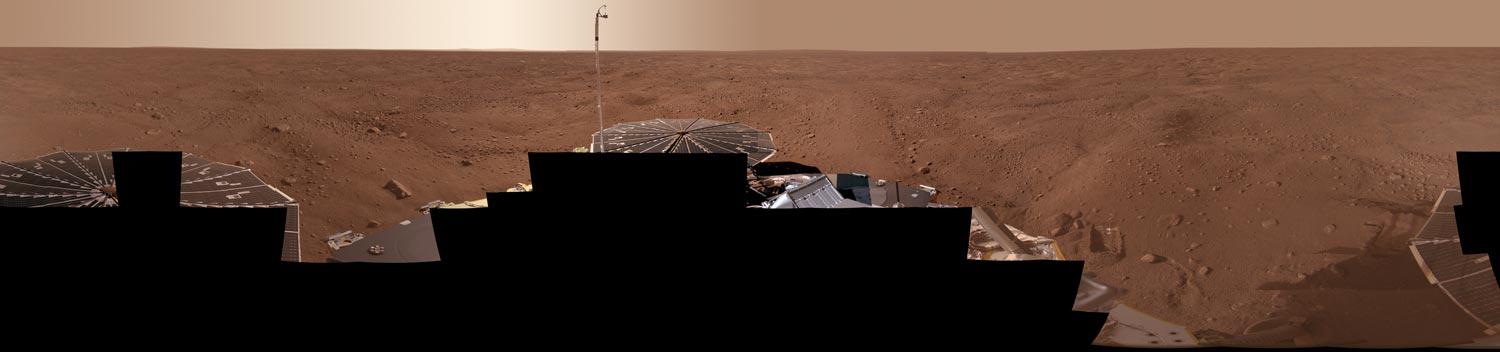
Panorama réalisé sur Mars par la mission Phoenix. © Nasa
Issue du programme Scout
Il s'agit de la première sonde automatique de la Nasa du programme Scout, dont la constructionconstruction a été décidée en réponse à l'ancien concept "'faster, better, cheaper", ensemble de missions dominées par un souci d'économie mais qui ont surtout généré des échecs.
À l'opposé, le programme Scout n'accorde pas la priorité à l'économie de moyens, mais se développe en ligne droite avec les résultats obtenus par les missions précédentes et les découvertes les plus récentes. Il est attendu que cette orientation, en se basant sur les résultats acquis plutôt que sur un programme à long terme, optimise les programmes de recherches en réduisant à la fois les délais et les coûts.

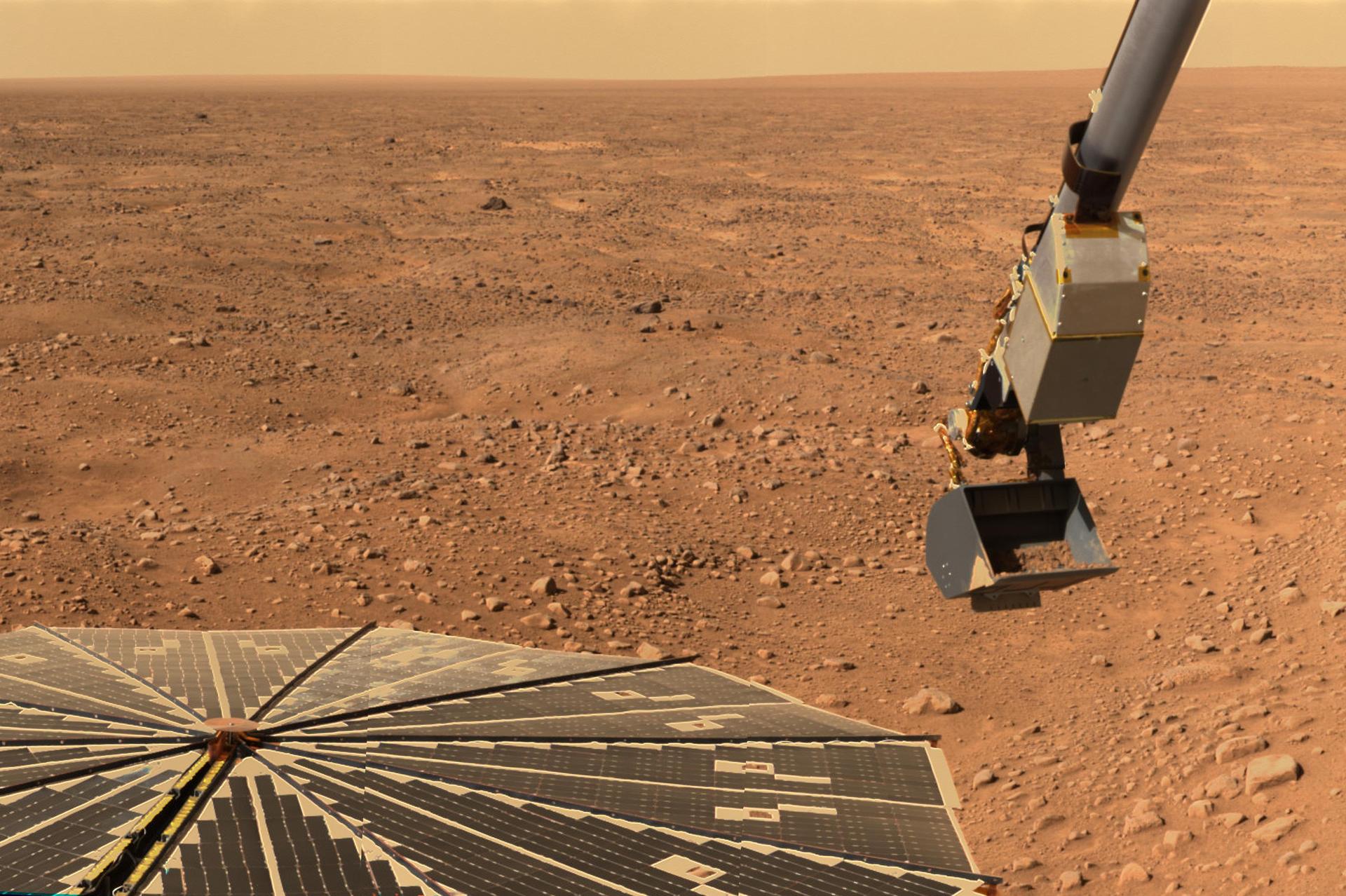
Le bras robotisé de Phoenix Mars Lander en action sur Mars. © Nasa
Les instruments de Phoenix
Robotic Arm (RA) - Bras robotisé
Ce bras portera jusqu'à une distance de 2,35 mètres de la sonde une petite pelle capable de creuser une tranchée de 50 centimètres de profondeur et d'y collecter des échantillons pour analyse.
Robotic Arm Camera (RAC) - Caméra du bras robotisé
Caméra miniaturisée est montée à l'extrémité du bras, pouvant transmettre des images en haute résolutionrésolution collectées par la pelle, et aussi des parois de la tranchée.
Surface Stereoscopic Imager (SSI) - Imageur stéréoscopique
Instrument hérité des sondes Mars Pathfinder et Mars Polar Lander, mais amélioré en y adaptant les capteurscapteurs utilisés par SpiritSpirit et OpportunityOpportunity. À l'instar de ces deux derniers, ses deux objectifs sont équipés de roues à filtres permettant d'obtenir des images dans 12 longueurs d'ondelongueurs d'onde, du violet au proche infrarougeinfrarouge depuis une position fixe à 2 mètres au-dessus de la surface.
Meteorological Station (MET) - Station météorologique
D'une masse totale de 7,5 kg, elle se compose de deux parties principales :
- Le LIDARLIDAR, un émetteur laserlaser fonctionnant dans deux longueurs d'onde différentes du proche infrarouge. Dirigé vers le haut, il émet des pulses (2500 fois par seconde) dont l'écho est reçu après réflexion sur les nuagesnuages de cristaux de glace ou aérosolsaérosols atmosphériques jusqu'à une hauteur de 3 kilomètres environ, dont il peut mesurer la hauteur avec une précision de 10 mètres.
- Un mât porteur d'instruments servant de support aux capteurs de pression atmosphériquepression atmosphérique et de température, ainsi que de vitessevitesse du ventvent.
Thermal and Evolved Gas Analyzer (TEGA) - Analyseur de gazgaz
TEGA est entièrement similaire à l'appareil jadis embarqué sur Mars Polar Lander. Pour la première fois depuis les sondes Vikingsondes Viking de 1976, il s'agira de se livrer à des recherches de composés organiques dans le sol de la Planète rouge. Il se compose de huit petits fours à usage unique, chacun de la taille d'une cartouche d'encre d'imprimante.
Microscopy, Electrochemistry, and Conductivity Analyzer (MECA) - analyseur microscopique et électrochimique
Il s'agit de l'expérience la plus complexe embarquée à bord de Phoenix. Elle comporte plusieurs instruments ou ensembles d'instruments destinés à analyser de nombreuses propriétés du sol et du sous-sol martien :
- Un laboratoire en milieu humide qui comprend quatre petits containers destinés à recevoir les échantillons. Après collecte par le bras robotiquerobotique et dépôt dabs le réceptacle celui-ci est hermétiquement fermé, puis une solution y est introduite. L'ensemble est alors agité durant environ une journée, durant laquelle et au terme de celle-ci un ensemble d'électrodesélectrodes mesurent la présence et la concentration de diverses solutéssolutés.
- Un premier microscope optiquemicroscope optique, similaire à ceux que l'on trouve ordinairement dans toutes les salles de travaux pratiques, doté d'une résolution de 4 micronsmicrons par pixelpixel.
- Un second microscope, baptisé FAMARS, fonctionne sur le principe de la force atomique. Contrairement aux modèles optiques, celui-ci procède non en observant la lumière réfléchielumière réfléchie ou réfractée par la cible, mais en la touchant, ou plutôt en l'effleurant.
- Une sonde de conductivité thermiqueconductivité thermique et électrique, directement fixée sur la pelle à l'extrémité du bras robotisé. Sa fonction sera de mesurer avec précision la conductivité électrique et thermique du sol durant le travail de creusement.









 - Domaine public")
 le 17 septembre 2014. © Nasa, JPL-Caltech, MSSS")













