. © Esa, Nasa")
. © Esa, Nasa")
au sommaire
Depuis son lancement, le 30 juillet dernier, du Centre spatial Guyanais par une Ariane 5, l'ATV-5 Georges Lemaître vogue en direction de la Station spatiale internationale (ISS). C'est aujourd'hui, à 15 h 30 (heure de Paris), qu'il doit enfin s'amarrer au complexe orbitalcomplexe orbital avec, à son bord, quelque 6,7 tonnes de fret. Restant sur place jusqu'au 25 janvier, il sera plusieurs fois sollicité pour rehausser l'orbite et servira aussi de module pressurisé.
Le site du Cnes retransmettra en direct à travers cinq caméras, l'amarrage de l'ATV. Une première et aussi une dernière, car il s'agit de son ultime mission. La prise d'antenne est annoncée à 14 h 45 (heure de Paris).
Tandis que le principal flux vidéo diffusera une émission commentée d'une heure sur le sujet, vous pourrez suivre les opérations menées depuis la Station grâce à deux caméras embarquées, l'une russe et l'autre américaine, placées à l'extérieur. Une autre caméra nous emmènera au cœur de l'événement, au centre de contrôle du Centre national d'études spatiales (Cnes) à Toulouse. Enfin, un dernier flux vidéo nous dévoilera, en temps réel et en compagnie d'images de synthèse, la progression de l'ATV jusqu'à son approche finale.
Un mécanisme de haute technicité
Si l'ATV est capable de s'amarrer de façon automatique -- c'est-à-dire sans assistance extérieure --, à la Station spatiale internationale en toute sécurité, c'est parce qu'il a notamment recours à un logiciellogiciel de vol d'une très grande complexité associé à un ensemble de capteurs dont nous allons expliquer les fonctions.

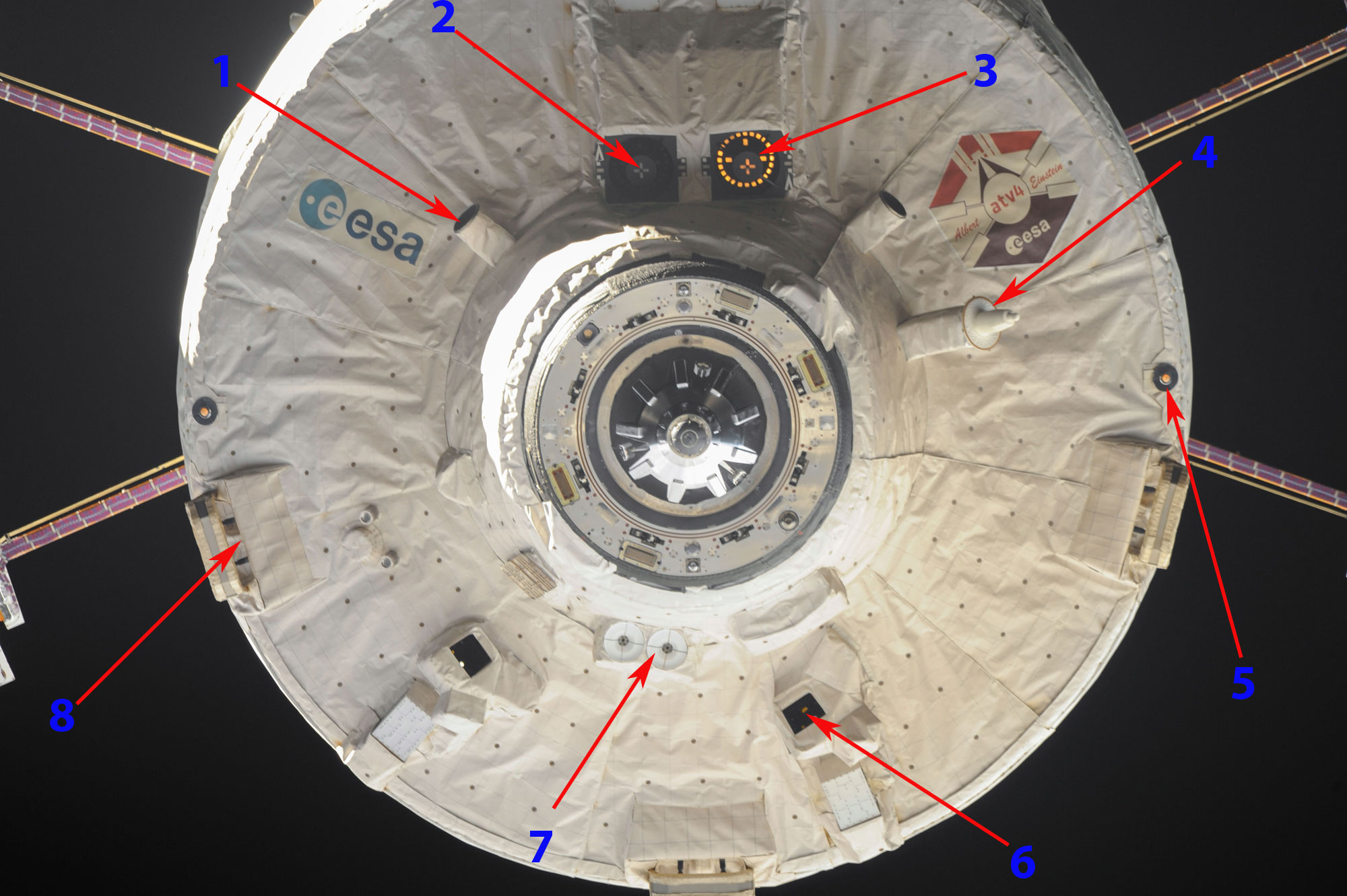
Le mécanisme d'amarrage de l'ATV et les capteurs dont il a besoin pour s'amarrer de façon autonome à la Station spatiale. À l'image, l'ATV-4 Albert Einstein lors de son désamarrage de l'ISS. © Esa, Nasa
Si tout le monde connaît le mécanisme d'amarrage russe de l'ATV, situé au centre de l'engin, très peu savent à quoi correspondent les autres dispositifs répartis autour de ce mécanisme. On note la présence de deux senseurssenseurs stellaires (1) lesquels permettent au module de se repérer par rapport à la position des étoilesétoiles. Entre eux se trouvent les crew visual target (2 et 3). La première cible (2) n'est plus utilisée depuis que la caméra fixée sur l'arrière du module de service de l'ISS Zvezda (où se dock l'ATV) est en panne. Elle est inamovible et ne peut donc être changée. Quant à la seconde cible, la 3, elle fonctionne. Afin d'éviter un dysfonctionnement des deux, la caméra de la deuxième est démontable et fut d'ailleurs remplacée.
Suit l'antenne du système Kurs (4) lequel sert uniquement à donner des informations de distances à l'équipage à bord de l'ISS. Celui-ci dispose ainsi de données transmises par radio à l'équipage qui sont indépendantes de celles utilisées par l'ATV lors de sa navigation automatique. On trouve également deux feux de navigation (5) qui permettent à l'équipage (via la camera qui regarde l'ATV à l'approche) d'avoir une idée, même grossière, de l'orientation de l'engin relative à la station orbitaleorbitale lorsqu'il n'est pas éclairé par le soleilsoleil. Sous le mécanisme d'amarrage, deux télégoniomètres (6) fonctionnent comme des pistolets laserlaser pour mesurer la distance et la vitessevitesse relative de la cible (ISS) grâce à ses rétroréflecteurs installés sur l'arrière de la Station. Ceux-ci mesurent aussi la direction angulaire relative de la cible, en considérant les angles azimutazimut et élévations de la direction de renvoi des rayons laser.
Entre ces deux télégoniomètres se trouvent deux vidéomètres (7). Ils sont comme des senseurs stellaires qui émettent des flashsflashs laser et sont réglés pour en reconnaitre les réflexions (comme des étoiles artificielles en quelque sorte) renvoyés par les mêmes rétroréflecteurs que ceux utilisés par les télégoniomètres. C'est donc une technique différente des télégoniomètres qui donne les mêmes paramètres (distance, vitesse relative, direction relative) mais en plus, grâce à un traitement d'image en trois dimensions (3D), ils donnent aussi l'orientation relative de la cible lorsque la distance est de quelques dizaines de mètres. Cela permet à l'ATV de connaître non seulement sa position relative mais aussi son orientation relative par rapport à la station afin de s'amarrer au bon endroit et avec la bonne orientation.
À quoi serviraient tous ces capteurs si l'ATV ne pouvait pas corriger sa trajectoire ? À l'image, on aperçoit trois des quatre blocs moteurs (8) de contrôle d'altitude et de position, composés de petits moteurs fuséefusée agissant par réaction en éjectant des gazgaz de combustioncombustion d'ergolsergols.
Une rentrée atmosphérique visant à préparer la fin de vie de l’ISS
La séparationséparation de l'ATV avec la Station spatiale est prévue le 25 janvier 2015. Sa rentrée dans l'atmosphèreatmosphère se fera, quant à elle, le 10 février 2015 avec un angle moins prononcé que pour les vols précédents afin de réaliser l'expérience Shallow reentry dans le cadre de préétudes sur la rentrée de l'ISS.
Lors de cette rentrée destructive, l'ATV-5 embarquera de nombreux capteurs parmi lesquels des accéléromètresaccéléromètres et caméras infrarougesinfrarouges. Celles-ci collecteront des données qui permettront de mieux estimer les zones de débris lors de la retombée de la Station spatiale. Cette expérience validera également certaines hypothèses de rentrée de l'ISS et surtout de voir comment se comporte les éléments de l'ATV qui ne manqueront pas de se détacher lors du retour prévu sous un angle similaire.
Rappelons que, et cela est très surprenant, tous les éléments de la Station furent lancés et assemblés sans qu'il ne soit nulle part écrit une quelconque solution certifiée, validée et acceptée par tous ses partenaires sur la façon dont sera gérée sa désorbitation en fin de vie... En clair, il n'existe aucune procédure. On sait juste comment l'empêcher de nous tomber sur la tête, en la rehaussant régulièrement !
Pourtant, la Station survole un très grand nombre de régions à fort taux de densité de population humaine... D'où la nécessité de garantir l'endroit où cette désorbitation se fera, car la moitié de la massemasse arrivera au niveau de la mer sous forme de pièces détachées. C'est tout l'intérêt de Shallow reentry qui embarque plusieurs expériences pour valider certaines hypothèses de rentrée.
Concernant la désorbitation, on a certes des idées qui s'appuient sur l'utilisation du cargo russe Progress mais les contrôleurs au sol sont unanimes pour souligner que l'ATV était le vaisseau possédant la meilleure capacité de contrôle de la désorbitation de la Station.




















, au-dessus du lac Svityaz, en Ukraine. © Ihor Khomych, via Spaceweather")


