 et Bryan en bas, ainsi que sur la vue de gauche. © Rémy Decourt")
 et Bryan en bas, ainsi que sur la vue de gauche. © Rémy Decourt")
au sommaire
Airbus Espace a inauguré son nouveau simulateur de désertdésert martien sur son site de Stevenage, près de Londres. L'inauguration a eu lieu en présence de Vince Cable, secrétaire d'État britannique à l'Innovation, David Parker, directeur général de l'Agence spatiale britannique (United Kingdom Space Agency)), et Alvaro Giménez, directeur science et exploration robotiquerobotique de l'Agence spatiale européenne (Esa).
Cet espace de 30 x 13 mètres et quelque 300 tonnes de sablesable simulent autant que faire se peut l'environnement martien en matière de couleur, d'éclairage et de texturetexture du sol. Le terrain de jeu sert à préparer la mission ExoMars 2018 de l'Agence spatiale européenneAgence spatiale européenne qui verra atterrir sur la Planète rouge le premier rover européen de l'exploration martien. Il est utilisé pour tester le système de locomotion du futur rover martienrover martien de l'Europe et développer les algorithmes du système de navigation pour apprendre à ce rover à se déplacer de façon autonome sur Mars.

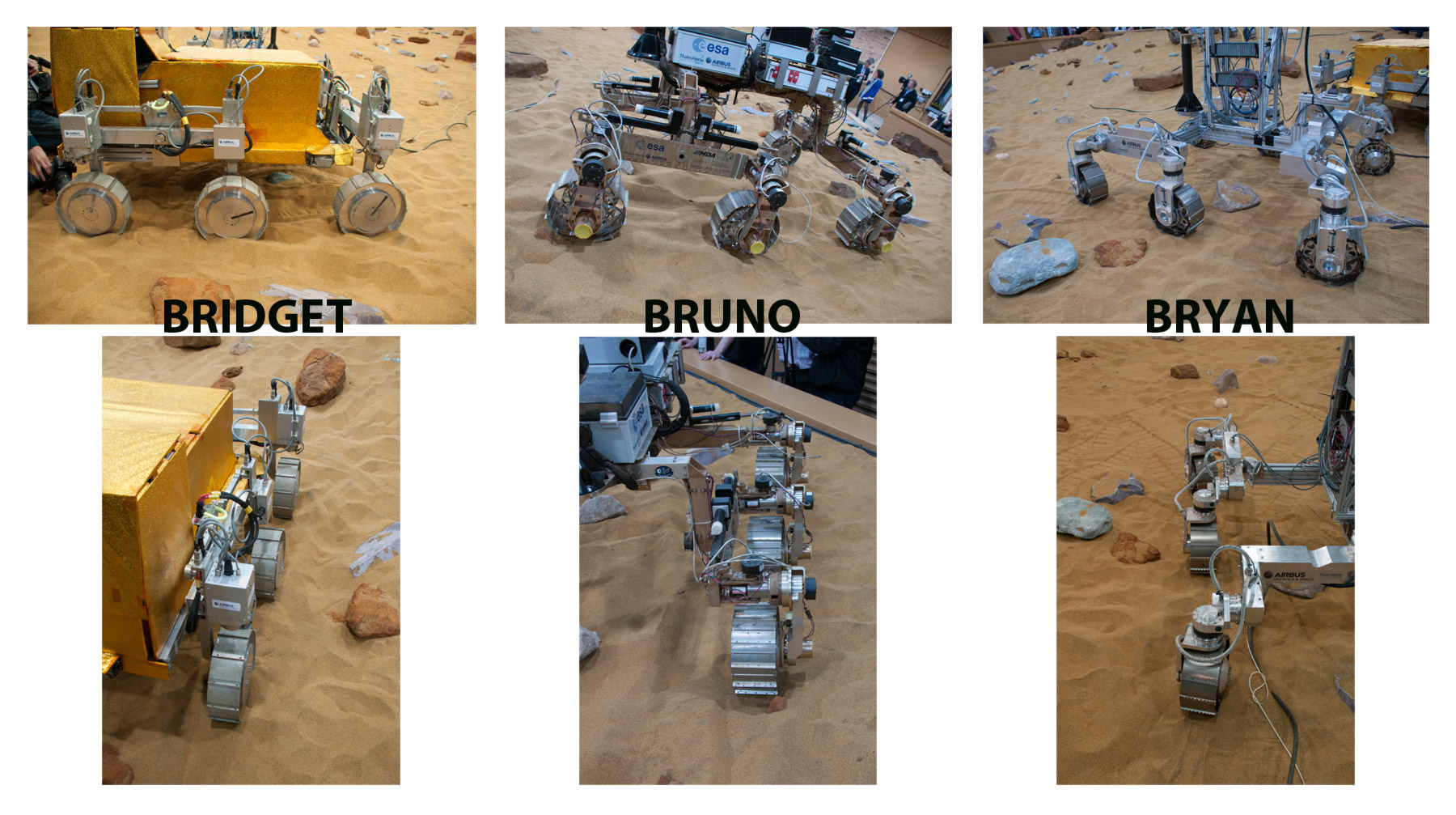
Gros plan sur les systèmes de locomotion des trois concepts de rover martien d'Airbus Espace. © Rémy Decourt
Pour y parvenir, Airbus Espace a conçu trois démonstrateursdémonstrateurs qui sont autant d'étapes dans la conception du « vrai » rover d'ExoMars 2018ExoMars 2018. Le premier des trois se nomme Bridget. Ce rover a permis de tester et valider certains aspects de locomotion, principalement les six roues motrices et en particulier les boggies, les trois bras sur le côté du châssis. Il est aujourd'hui employé comme plateforme d'expériences et a récemment été utilisé au Chili, en immersion, pour apprendre à commander un rover martien en milieu inconnu depuis un centre de contrôle.
Les navigations du rover d’ExoMars commencent dans un bac à sable
Bruno, le deuxième, a ceci d'intéressant qu'il est bien plus représentatif, au niveau de la taille, du rover qui sera envoyé sur Mars. Son système de locomotion est plus sophistiqué que celui de Bridget. Ses six roues sont directrices et permettent de faire du crabbing. En outre, il est à un tiers de la masse prévue d'ExoMars 2018, de sorte que les efforts mécaniques sur le sable sont déjà plus représentatifs de ce qui attend le rover sur Mars.
Le petit dernier est Bryan. Celui-ci est bien plus représentatif que ses deux prédécesseurs. Ce qui le différencie de Bruno, ce n'est ni la taille ni la masse, mais son système de locomotion assez réaliste comparé à celui qui sera employé sur Mars. Ses six roues peuvent être orientées individuellement dans tous les sens. Cela lui permet de faire du wheel walking, de sorte que le rover peut théoriquement se sortir de toutes les situations critiques, qu'il soit bloqué autour de cailloux ou en fâcheuse posture dans des dunes ou du sable. Enfin, son centre de gravité est à peu près à l'endroit attendu d'ExoMars 2018.

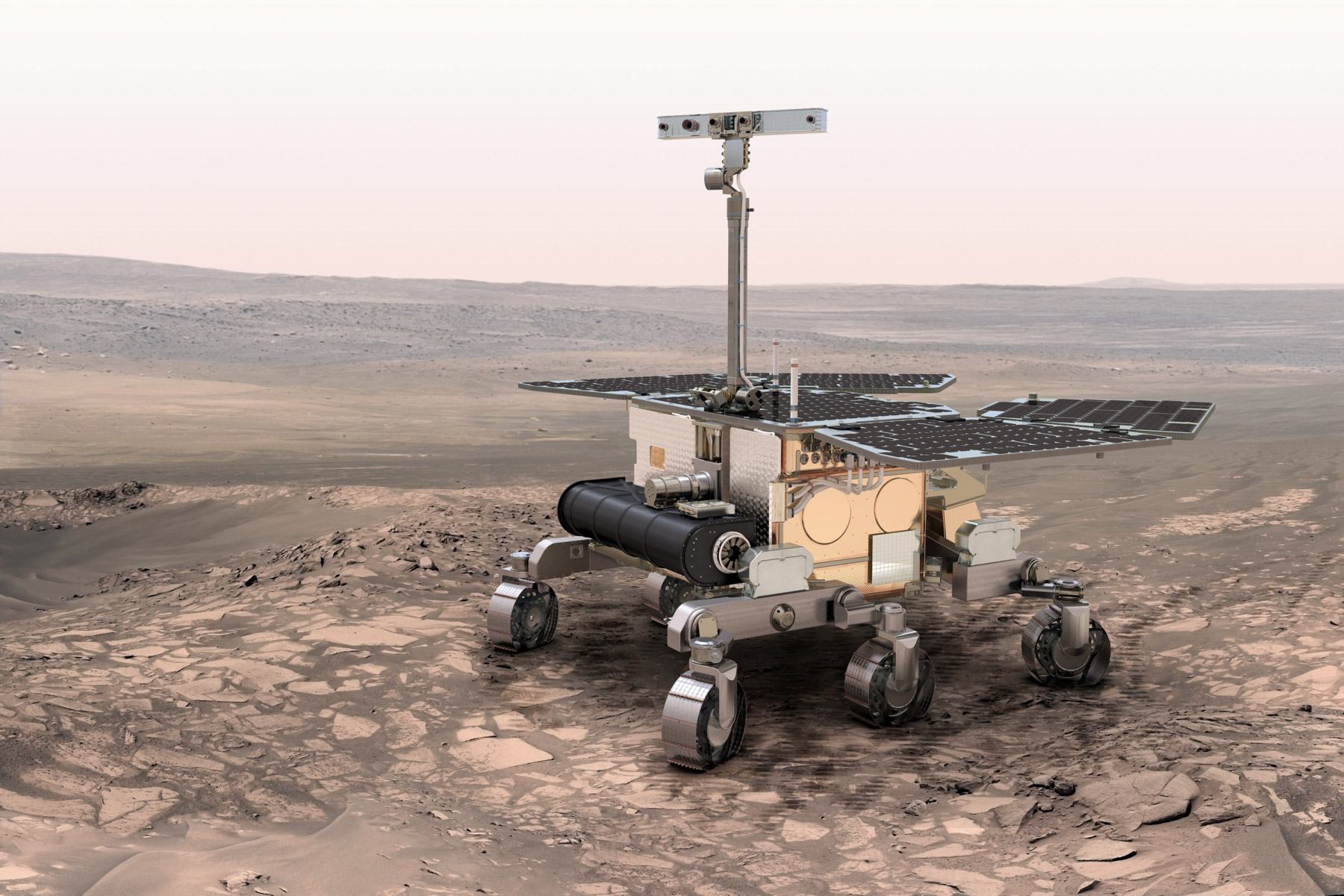
Le rover européen de 2018 sondera le sol martien à l'aide d'un radar et réalisera des forages pour prélever des échantillons jusqu’à deux mètres de profondeur. © Esa
Le rover sera-t-il construit par des robots ?
Maintenant qu'Airbus Espace dispose d'un simulateur de terrain martien très réaliste de l'environnement martien, il peut tester les algorithmes de navigation mis au point pour ExoMars 2018. En mots plus simples, il s'agit de valider les trois aspects de l'autonomieautonomie du rover que sont la perception (la manière dont le rover voit et interprète son environnement), la navigation (édition de cartes de soncartes de son environnement) et la création de trajectoires. Une autre phase prévoit de contrôler le déplacement du rover le long de la trajectoire qu'il a lui-même définie.
Le rover d'ExoMars 2018 sera assemblé à Stevenage dans une salle blanche qui reste à construire. Cette salle blanche sera une des plus propres jamais réalisées en Europe, avec un taux de contaminationcontamination de micro-organismesmicro-organismes le plus bas possible. C'est la condition sine qua non pour éviter les résultats ambigus retournés par les sondes Vikingsondes Viking en 1976 sur d'hypothétiques traces de vie martienne.
Afin d'éviter tout risque de découvrir sur Mars quelque chose que le rover aurait lui-même apporté de la Terre, Airbus Espace étudie la possibilité de le faire assembler par des robotsrobots afin qu'il ne soit jamais en contact avec des humains. Le procédé, quoi qu'il en soit, devra être rapidement mis au point car les premières pièces sont prévues pour arriver dès le début de l'année prochaine.

, et Vladimir Popovkin, celui de Roscosmos. © Esa")


 de l'Agence spatiale européenne. Le lancement de ce rover martien, à bord d'un lanceur russe Proton, est prévu en juillet 2020. © ESA")



















