












au sommaire


Les robots chirurgiens d'aujourd'hui : le mode automatique
Aujourd'hui, la plupart des dispositifs robotiquesrobotiques utilisés en routine clinique pour la pratique chirurgicale fonctionnent selon l'un des deux modes de commande : automatique et téléopérationtéléopération. Voici ici le mode automatique.
Principe et application du mode automatique
Le mode automatique consiste en l'exécution d'un plan préparé avant l'opération, après un recalage géométrique au début de l'opération. Le robotrobot Caspar est un exemple techniquement réussi, au plan technologique, de ce type de système : il a été conçu il y a plus de dix ans pour des applications de chirurgiechirurgie orthopédique.
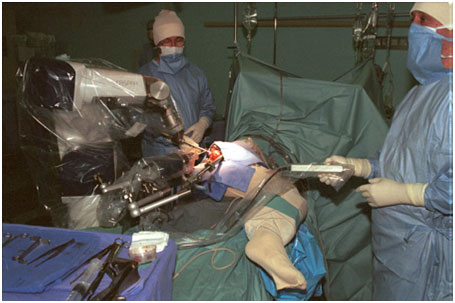
Concrètement, le chirurgien qui doit poser un implantimplant osseux travaille sur des images 3D de son patient et découpe virtuellement l'os, pour y placer une prothèseprothèse. Ceci se passe sur un ordinateurordinateur. Dans la salle d'opération, l'équipe place le robot, qui repère l'os (recalage) et qui découpe avec une très grande précision la forme voulue, de façon automatique, sans intervention du chirurgien. Les avantages de ce robot sont principalement sa précision et sa fiabilité. Mais il y a plusieurs inconvénients.

Les inconvénients du mode automatique
D'abord, le mode automatique reste aujourd'hui limité à des gestes pour lesquels la géométrie et la dynamique de l'environnement ne varient pas, afin que la planification géométrique reste possible. C'est pourquoi toutes les interventions assistées sur des tissus déformables, ou sujets à des mouvements physiologiques, ne peuvent exploiter cette approche.
Ensuite, l'acceptation d'une machine telle que celle-ci dans un bloc opératoire pose problème, car le chirurgien est mis hors de la boucle pendant l'intervention. Ce n'est pas toujours bien accepté. Ici, interviennent les fameux facteurs humains... Il n'est pas impossible que ceux-ci soient à l'origine du relatif insuccès de Caspar : après avoir été déployé dans de nombreux centres cliniques, son utilisation reste aujourd'hui limitée et elle a été abandonnée dans de nombreux endroits.






















, au-dessus du lac Svityaz, en Ukraine. © Ihor Khomych, via Spaceweather")

