












au sommaire
Au-delà de la première définition très large que nous avons donnée en introduction, qui englobe de nombreux types de machines et notamment tous les instruments actifs, il nous faut distinguer deux catégories de comanipulateurs : série et parallèle.

Le robot Neuromate est l'un des premiers robots utilisés en chirurgie. © Renishaw, DR


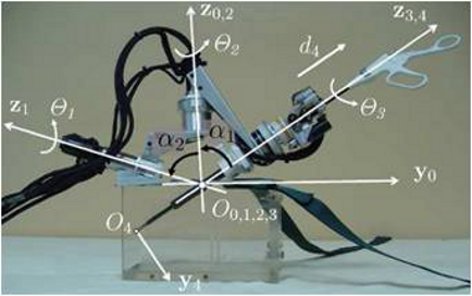
Il existe deux types de comanipulateurs : série et parallèle. © isir.upcm.fr
Comanipulateur série
Définition : un comanipulateur série est un système qui présente des mobilités venant s'ajouter à celles de l'opérateur. Le mécanisme du comanipulateur est donc mis en série avec la chaîne cinématique que constituent le bras et la main de l'opérateur. Il s'agit d'un instrument que l'opérateur saisit manuellement par son extrémité dite proximale et qui peut produire un mouvement indépendant de son extrémité dite distale, en interaction avec l'environnement.

Le robot MC2E permet de manipuler un instrument autour d'un point d'incision, tout en laissant libre l'accès à la poignée. Grâce à un capteur, il peut mesurer les efforts appliqués sur la poignée et ceux appliqués sur les organes. Le robot peut utiliser ces informations pour améliorer le ressenti des contacts instrument-organes pour le chirurgien. © Isir
Ainsi, une simple visseuse électrique est un comanipulateur série rudimentaire à un degré de liberté de rotation. Cet exemple permet d'illustrer une notion fondamentale caractérisant les systèmes de comanipulation : la réalisation du geste résulte d'une coordination entre les actions directes de l'opérateur et celles qu'il commande à la machine. Ainsi, ceux qui, parmi les lecteurs, ont déjà essayé d'utiliser une visseuse électrique savent que la force d'appui axialeaxiale appliquée par l'opérateur doit être synchronisée avec l'exercice du couple de vissage (action simultanée de l'opérateur sur la visseuse et de la visseuse sur la vis), tout en modulant la vitesse. On peut noter également que la machine est aussi capable d'actions autonomes, comme la limitation de couple permettant d'éviter la dégradation des têtes de vis. Enfin, s'agissant de l'interface, elle prend souvent la forme d'une gâchette, c'est-à-dire qu'on réalise le couplage entre le mouvement des doigts et celui de la visseuse.
Comanipulateur parallèle
Définition : un comanipulateur parallèle est un système capable d'exercer sur un instrument des efforts venant s'ajouter à ceux produits par l'opérateur. L'instrument est alors un solide dont la partie proximale est reliée à deux chaînes cinématiques parallèles (le bras de l'opérateur et le robotrobot), la partie distale étant en contact avec l'environnement.
Un exemple simple est celui des équilibreurs pneumatiquespneumatiques utilisés dans l'industrie pour assister les ouvriers. Ce sont des pistons exerçant une force de rappel constante, accrochés au plafond par une rotulerotule passive, auxquels on suspend des outils lourds dans les ateliers des usines afin de soulager les ouvriers de leur poids.
Avec un comanipulateur parallèle, les efforts de l'opérateur s'ajoutent à ceux qui sont exercés par le système actif pour produire les mouvements de l'objet manipulé, alors qu'avec un comanipulateur série, se sont les vitesses qui s'ajoutent.

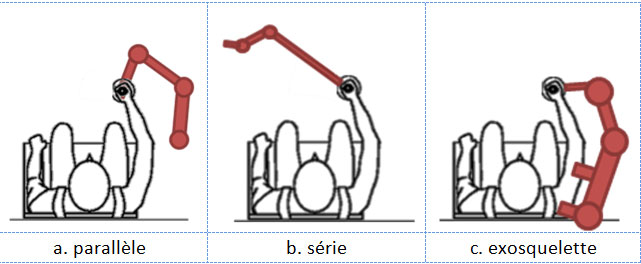
Trois paradigmes de la comanipulation. © DR
Il est à noter que d'autres façons de coupler les actions mécaniques d'un opérateur humain et celles d'une machine sont envisageables. Les exosquelettes actifs, par exemple, sont des mécanismes parallèles avec plusieurs points d'attache (cf. Fig. 2.c). Ils fonctionnent assez différemment des comanipulateurs parallèles définis ci-avant et sortent du cadre de ce dossier.
Aujourd'hui, la plupart des dispositifs robotiquesrobotiques utilisés en routine clinique pour la pratique chirurgicale fonctionnent selon l'un des deux modes de commande décrits ci-après.





.Crédit : INSERM")




. © Dall.E")






