









au sommaire
Psikharpax vient du nom du roi des rats, tiré d'une parodie de L'Iliade (épopée attribuée à Homère). D'où vient le financement de ce projet ? Quelle en est l'équipe ? Voici quelques précisions.


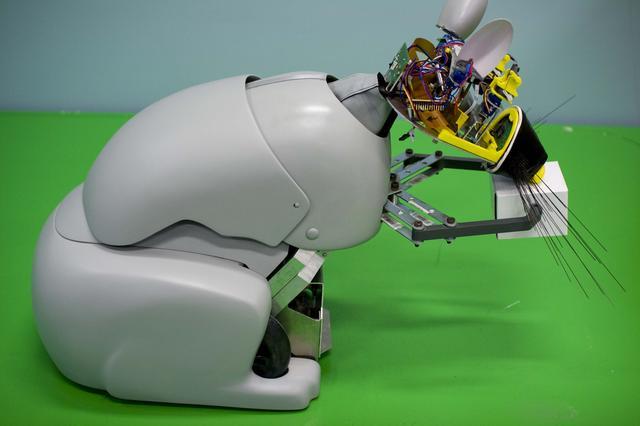
© CNRS Photothèque/ISIR/Rajau Benoît
Le projet visant à la conception du robotrobot Psikharpax a été initié par Jean-Arcady Meyer, directeur de recherches CNRS. C'est lui qui dirige actuellement ce projet au sein de l'Institut des systèmes intelligents et de robotique (Isir), sur le campus de l'Université Pierre et Marie CurieMarie Curie à Paris.


Le financement du projet
Le projet a d'abord été financé par le programme Robea du CNRS, puis par l'ISTT Cognitive Systems Unit de la commission européenne grâce au projet ICEA (Integrating CognitionCognition, Emotion and Autonomy)). À cette occasion, dix équipes de recherche de différents pays européens ont travaillé ensemble pendant quatre ans pour aboutir au robot Psikharpax et aux connaissances théoriques sur les mécanismes cérébraux qu'il a actuellement.
L'équipe du projet
Mehdi KhamassiMehdi Khamassi, auteur de ce dossier, a été nommé chercheur CNRS dans l'équipe de l'Isir concernée par Psikharpax (équipe Systèmes intégrés, mobilesmobiles et autonomes). Il avait également déjà participé à ce projet dans le cadre de sa thèse (soutenue en 2007). La particularité de l'Isir est de fournir un environnement de recherche particulièrement riche, comprenant de la mécanique, de l'électronique, de la robotiquerobotique, du traitement du signal et de l'intelligence artificielleintelligence artificielle. C'est pourquoi, dans cette équipe, divers chercheurs ont pu contribuer d'une part à la conception et la constructionconstruction du prototype Psikharpax et, d'autre part, au développement de modèles computationnels neuromimétiques pour la perception multimodale (vision, toucher, audition), pour la navigation spatiale autonome et pour l'apprentissage.
On peut citer les permanents : Ryad Benosman, Bruno Gas, Benoît Girard, Christophe Grand, Agnès GuillotAgnès Guillot, Mehdi Khamassi, Jean-Arcady Meyer ; les postDoc et doctorants : Mathieu Bernard, Ken Caluwaerts, Laurent Dollé, Loïc Lachèze, Louis-Emmanuel Martinet, Steve N'Guyen, Denis Sheynikhovich ; et l'industriel : Brain Vision System.

Les Psikharpax réalisés
Deux versions de Psikharpax existent actuellement, toutes deux conçues par Christophe Grand à l'Isir. L'une a des capacités de redressement et de préhension. Cela permet au robot de se relever pour percevoir des indices environnementaux lointains, et d'utiliser ses pinces pour pouvoir attraper des objets. L'autre version est utilisée notamment pour étudier tous les comportements de navigation spatiale, dans lesquels il n'y a pas besoin de manipuler des objets mais de se déplacer d'un point à un autre dans l'espace.




/ISIR/Fauverte Nicolas, tous droits réservés")





 dans l’espoir de répondre à LA question : sommes-nous seuls dans l’Univers ? © IgorZh, Adobe Stock")













