









au sommaire
Un dernier ensemble de travaux qui ont été effectués dans le cadre du projet Psikharpax ont concerné la localisation spatiale, et l'utilisation des informations cartographiques par le robotrobot pour pouvoir naviguer de façon optimale et adaptative vers un but.

Ces travaux se sont fondés sur l'hypothèse formulée par les neurobiologistes depuis les années 1970 qu'une partie du cerveau appelée l'hippocampehippocampe contribuait à l'élaboration d'une « carte cognitive » de l'environnement (John O'Keefe and Nadel, 1978).


Une carte cognitive de l'environnement dans notre cerveau
En effet, on savait déjà que les animaux sont capables de retrouver directement un lieu qu'ils ont déjà visité, ou de prendre des raccourcis pour revenir à leur nid, même si ça les oblige à passer par des chemins qu'ils n'ont jamais empruntés. Cela suggère qu'ils ont une représentation mentale de leur environnement contenant des informations topologiques (la configuration entre les lieux, comme un plan de métro) et des informations métriques (la distance entre les lieux). Les travaux de John O'Keefe au Royaume-Uni ont permis d'identifier les bases neurales de cette carte cognitive en montrant l'existence de cellules de lieu dans l'hippocampe chez le rat.
 mesurée dans un neurone de lieu de l'hippocampe. Les zones bleues sont les endroits où le neurone a eu une faible activité (il n'a pas ou peu émis de potentiels d'action). Les zones jaunes, peu d'activité. Les zones rouges sont les endroits où le neurone a émis beaucoup de potentiels d'action, donc correspondant au « lieu préféré » du neurone. Enregistrements neurophysiologiques de neurones appelés les « cellules de lieu » dans l’hippocampe du rat pendant l’exploration d’un environnement cubique. Adapté de Min W. Jung, Sidney I. Wiener & Bruce L. McNaughton (1994). © CNRS/Wiener Sidney")
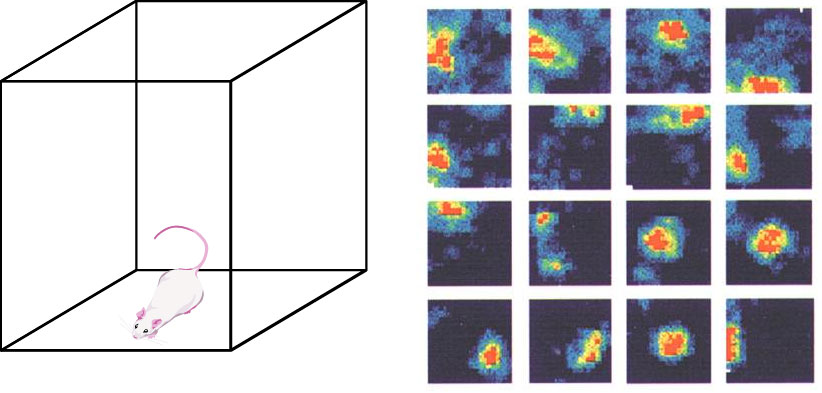
Les cellules de lieu sont des neuronesneurones dont l'activité se manifeste quand le rat se trouve à une position spécifique de l'espace. Chaque neurone représente une position différente, et la conjonction couvre l'ensemble des positions possibles dans une arènearène, un labyrinthe ou une pièce. C'est comme si le rat avait en permanence un GPSGPS qui lui permettrait de se localiser dans l'espace. Mais bien sûr, cette information n'est pas parfaite. Différents travaux ont été effectués en laboratoire pour tromper le rat sur sa position, en changeant par exemple la position d'un objet, ou en actionnant un tapis roulanttapis roulant sur lequel marche le rat. On observe dans ces cas-là que l'activité des cellules de lieu ne répond plus aux mêmes positions, comme si le rat ne savait plus où il se trouve.
Ceci suggère au passage que l'altération de cette partie du cerveaucerveau contribue aux phénomènes de désorientation que l'on peut parfois ressentir. D'autres neurones existants aussi dans le cerveau du rat et reliés au même système hippocampique vont répondre non pas à la position dans l'espace, mais à l'orientation (nord, sud, est, ouest) ou à la distance parcourue dans une certaine direction. Les premières sont appelées les cellules de direction de la tête, les deuxièmes les cellules de grille.

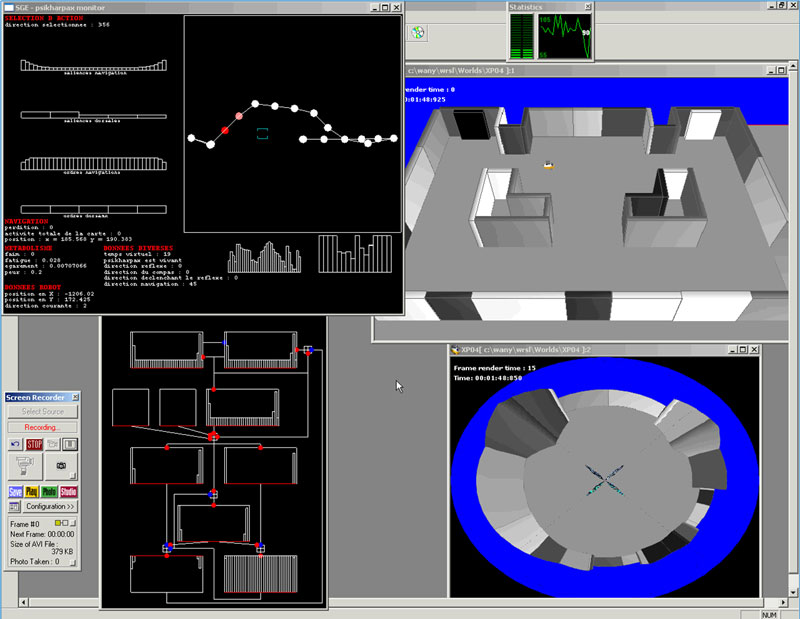
Une partie des travaux effectués sur le robot rat Psikharpax a consisté à reproduire informatiquement un modèle de l'hippocampe pour permettre au robot de se localiser dans l'espace. On laisse ensuite le robot explorer aléatoirement son environnement et se construire progressivement une carte cognitive. Il y mémorisera notamment où sont localisées les ressources et où il y a des dangers, où il y a des obstacles, d'où proviennent certains sons qu'il a entendu, et quels endroits peuvent être reconnus par la différence de rugosité des mursmurs.
Vidéo de simulations du robot construisant une carte mentale de l'environnement pendant l'exploration. Loïc Lachèze, Benoît Girard, Agnès Guillot. © ISIR/Lachèze Loïc















