









au sommaire
Le robotrobot Psikharpax est doté de nombreux systèmes sensoriels qui lui permettent de percevoir ce qui l'entoure et de se construire une représentation interne de son environnement : vision binoculaire, audition, vibrisses (ce qu'on appelle communément les moustachesmoustaches), odométrie (une estimation de ses propres déplacements), système inertiel (qui lui permet de connaître la position de son corps dans l'espace et de savoir lorsqu'il perd l'équilibre).


Psikharpax possède de nombreux systèmes sensoriels pour appréhender son environnement.

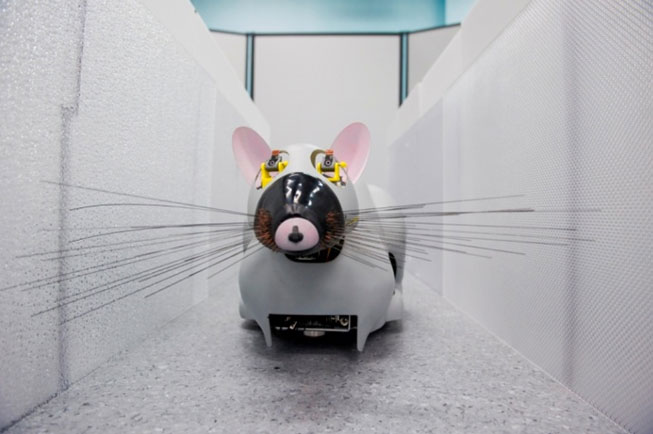
Certains de ces senseurssenseurs, comme les vibrisses, sont encore rares chez un robot, et sont donc intéressants à étudier pour en analyser le potentiel complémentaire aux capteurs courants en robotiquerobotique.
On voit ici comment le robot-rat utilise ses vibrisses pour naviguer. © Mehdi Khamassi/YouTube
Le problème de la fusion d’informations multisensorielles
Par ailleurs, l'utilisation de capteurs relevant de modalités sensorielles différentes (vision, audition, toucher) pose un défi qui est commun à la biologie et à la robotique : le problème de la fusion d'informations multisensorielles. Comment fait-on pour comparer, mettre en commun, combiner des informations mesurées dans des espaces totalement différents ? Comment donner plus d'importance aux unes ou aux autres, par exemple lorsque le toucher donne des informations qui ne correspondent pas à ce qui a été vu ?

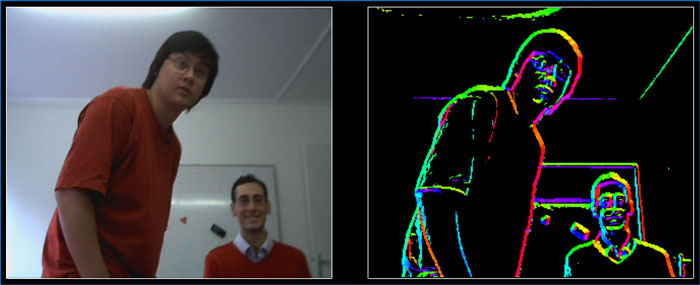
Le principe biomimétiquebiomimétique qui suppose une similitude des traitements qui sont effectués par les différents senseurs est novateur. Il a été concrétisé par un mécanisme mis au point par la société Brain Vision systems et fonctionne sur une carte électronique à l'intérieur du robot. Il applique le même type de transformation spatiotemporelle aux informations mesurées par les capteurs visuels (caméras), auditifs, et tactiles (vibrisses). Au fond, dans tous les cas il s'agit de distinguer les objets, de distinguer les sons, de mettre l'accent sur les contrastescontrastes entre couleurs, entre surfaces, entre fréquences, et de mesurer la dynamique temporelle des signaux perçus.


L'audition de Psikharpax
La perception auditive du robot est réalisée par deux capteurs (micros) situés dans les « oreilles » du robot, avec chacun un pavillon permettant de réverbérer correctement le son. Le fait d'avoir deux capteurs auditifs, permettant une écoute binaurale comme chez le rat, est d'un grand intérêt puisqu'elle permet au robot de localiser finement d'où provient le son qu'il entend. En effet, la localisation de sources sonores repose principalement sur l'estimation des différences de temps de propagation entre la source et les deux capteurs auditifs placés à des positions différentes sur la tête du robot. Cela permet au robot de mesurer les différences d'intensité (Interaural Intensity Difference, IID) et de phase (Interaural Phase Difference, IPD) captées par ses deux oreilles et ainsi d'en déduire le plus précisément possible d'où provient le son.

Appréhension de l'environnement : les vibrisses
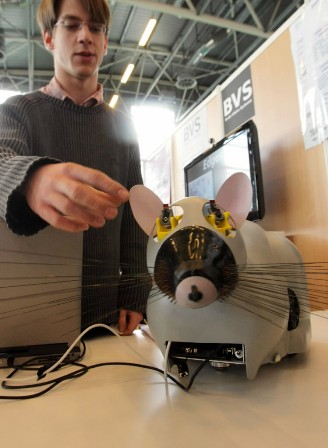
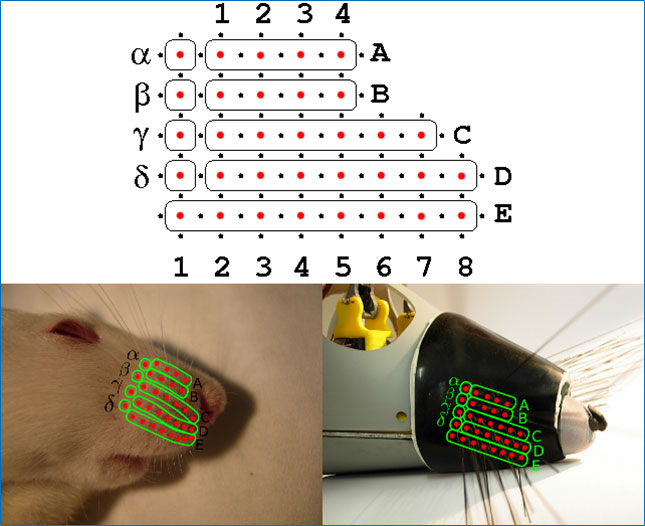
Les vibrisses ou moustaches du robot sont organisées, de chaque côté de la tête, selon une matrice identique à celle du rat. Il y a au total 33 vibrisses de chaque côté, des courtes et des plus longues qui permettent, soit de reconnaître les détails des objets que le robot touche de près, soit de détecter des obstacles latéraux perçus par le robot pendant ses déplacements.

Pendant le déplacement, les vibrisses permettent d'appréhender et d'éviter les obstacles, de longer les mursmurs sans se cogner lorsque les couloirs et galeries sont étroits, de reconnaître les texturestextures des murs et des objets, et ainsi de mieux se localiser. Par exemple, comme chez le rat, le robot mémorise que les murs du couloir qui mène à sa « réserve de nourriture » sont rugueux, tandis que les murs du couloir qui mène vers une « zone de danger » sont lisses. Toucher l'un de ces murs avec ses vibrisses peut aider le robot à reconnaître dans quel couloir il se situe, et ainsi adapter son comportement pour retrouver de la nourriture tout en évitant les dangers.
Cependant, en plus de traiter correctement chaque modalité sensorielle, savoir comment intégrer les informations issues de tous ces traitements est, comme on l'a évoqué plus haut, un problème non encore totalement résolu. Là encore, l'inspiration d'une partie du cerveau du rat regroupant ce que l'on appelle le colliculus supérieur et les ganglions de la baseganglions de la base a pu contribuer à faire avancer les connaissances dans ce domaine. En effet il est avéré que ces noyaux sous-corticaux, contenant des centaines de milliers de neuronesneurones, fusionnent l'information de différentes modalités sensorielles et leur donnent à chacune un ordre de priorité pour déterminer lesquelles vont le plus influencer le comportement. Leur modélisation pourrait donc, par exemple, aider le robot à décider dans quelle direction il doit orienter sa tête pour focaliser son attention, soit vers le son perçu, soit vers l'objet vu, tout en évitant la paroi lisse de la zone de danger.




/ISIR/Fauverte Nicolas, tous droits réservés")


")






, responsables de quelque 40 000 décès en France. © Ponchita, Adobe Stock")




")


