









au sommaire
Une fois que le cerveaucerveau artificiel du robotrobot dispose d'un certain nombre d'informations sensorielles décrivant ce qui entoure le robot, une question importante est de savoir quelle action celui-ci va décider d'effectuer pour satisfaire ses besoins et ses motivations.

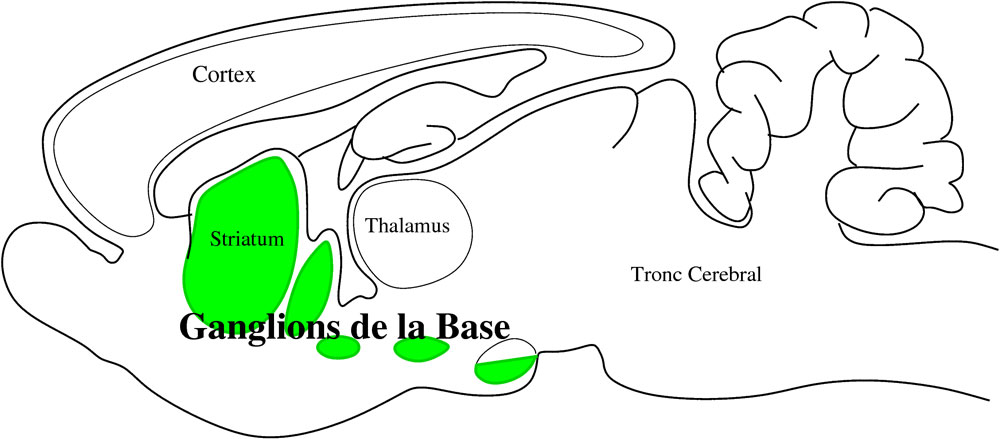
Nous avons déjà mentionné le fait que chez le rat, un ensemble de noyaux sous-corticaux (appelés les ganglions de la baseganglions de la base) était important pour décider dans quel sens orienter sa tête, et ainsi focaliser son attention vers des zones de l'espace d'où parviennent des sons ou des images.
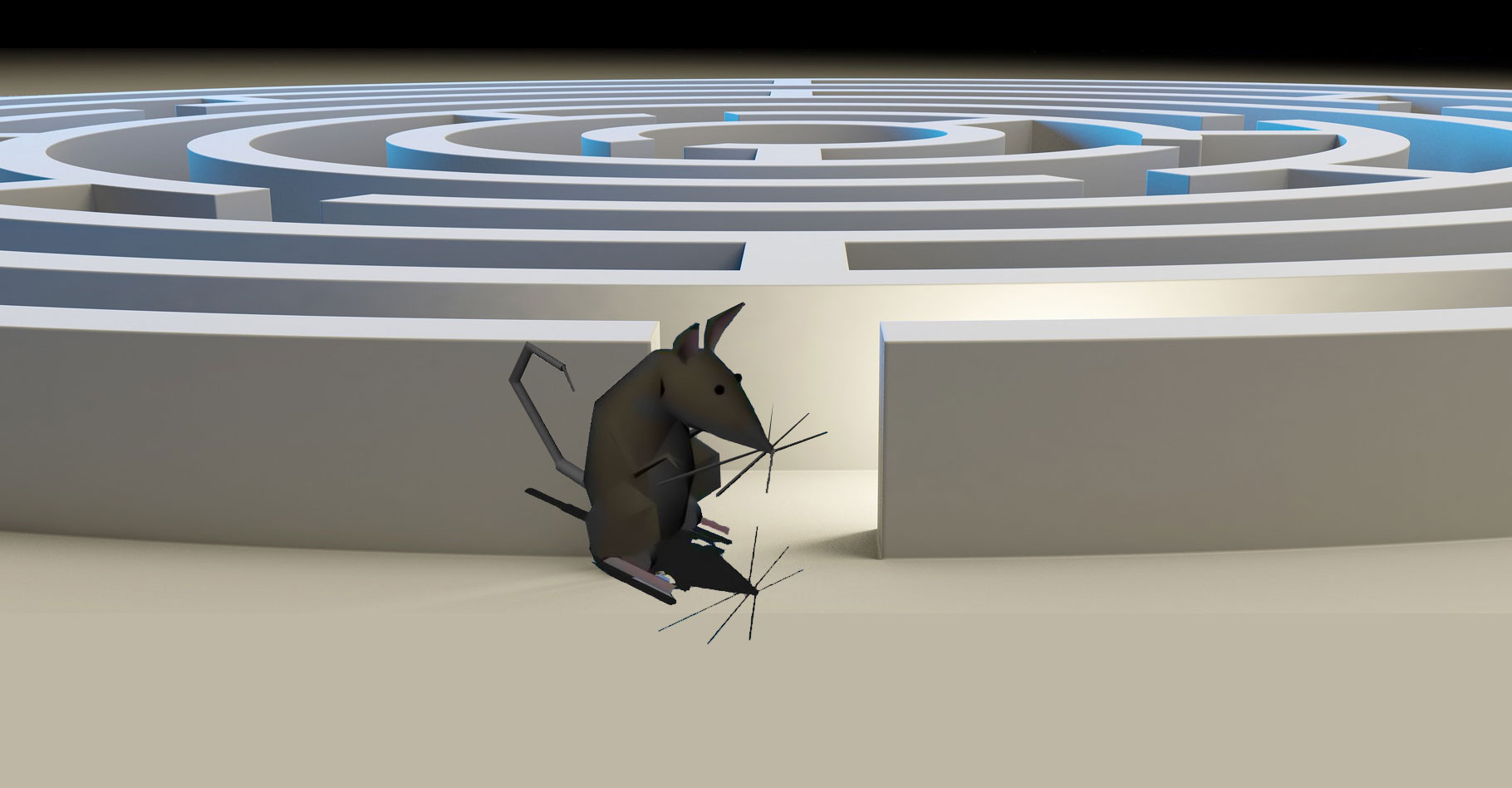
Le robot peut sélectionner une action grâce aux ganglions de la base. © Benoît Girard/AnimatLab/YouTube
La sélection d'une action par les ganglions de la base
Il s'avère que les ganglions de la base sont bien plus importants que pour les simples mouvements de la tête. Les neurobiologistes pensent que c'est un centre important dans le cerveau pour résoudre le problème de la sélection de l'action. Quelle action effectuer à chaque instant ? Quelles actions sont compatibles et lesquelles sont contradictoires ? Puis-je avancer tout en tournant ma tête et en me grattant le museau ?

On sait que dans le cerveau du rat, les ganglions de la base reçoivent une convergence d'informations provenant de différentes parties du cerveau, et que la sortie des ganglions de la base effectue une inhibitioninhibition sur le système moteur. Cela permet de bloquer en permanence la plupart des actions, et de désinhiber (activer) certaines actions spécifiques en fonction des besoins.
Une des illustrations de cette fonction provient de l'observation des troubles d'initiation et de séquençageséquençage du comportement chez les gens atteints de la maladie de Parkinson ou de la maladie de Huntingtonmaladie de Huntington. Or dans ces maladies, on sait que les circuits nerveux des ganglions de la base dégénèrent.

Étude de la simulation des ganglions de la base sur les robots
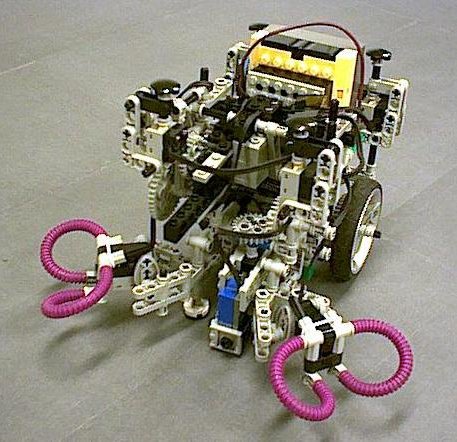
Dans le cadre du Projet Psikharpax, un grand nombre de travaux ont été effectués pour tester la capacité d'un modèle mimant le fonctionnement des ganglions de la base à bien guider les actions du robot. Ces travaux ont d'abord été effectués sous la forme de simulations informatiquessimulations informatiques, puis ont été appliquées sur le robot.
Pendant sa thèse, Benoît Girard a montré qu'en comparaison avec un simple système ingénieur de sélection de l'action qui choisirait à chaque fois l'action la plus fortement activée et inhiberait toutes les autres, le modèle de Psikharpax inspiré des ganglions de la base avait des propriétés de persistance de l'action qui permettait une économie d'énergie (Girard et al., 2003). Cela s'illustre par ce qu'on appelle le paradoxe de l'âne de Buridan. La légende veut que cet âne soit mort de faim à force d'hésiter entre son picotin d'avoineavoine et son seau d'eau. En effet, si l'on a un peu plus faim que soif et que l'on commence à manger, cela fait diminuer la faim par rapport à la soif. Alors on se retrouve à avoir plus soif que faim et on décide d'aller boire, même si l'on a encore faim. Cela produit des alternances perpétuelles entre deux ressources situées à des lieux différents, ce qui fait gaspiller de l'énergie à cause de tous ces déplacements. À l'inverse, les ganglions de la base permettent une persistance dans l'action en cours avant de passer à autre chose, ce qui fait économiser des déplacements et donc de l'énergie.
 cachée au bout de certains bras du labyrinthe. © ISIR/Khamassi Mehdi/Rolland Manuel/Guillot Agnès")
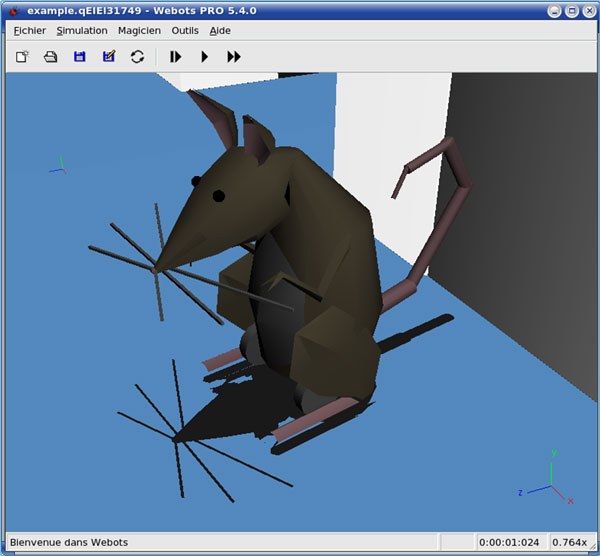
Simulation du système de sélection de l’action, inspiré des ganglions de la base, par un avatar de Psikharpax. L’expérience du labyrinthe en croix reproduit des tâches de laboratoire effectuées par des rats qui doivent apprendre à choisir les bonnes actions pour obtenir de la récompense (de la nourriture ou de la boisson) cachée au bout de certains bras du labyrinthe. © ISIR/Khamassi Mehdi/Rolland Manuel/Guillot Agnès
















. © Dall.E")






