
au sommaire


Cet alpiniste mécanisé pourra un jour aller inspecter un mur, le peindre ou déboucher la gouttière. © SRI International
Il faut le voir pour le croire. Cette curieuse machine de forme rectangulaire, longue de 25 centimètres et épaisse d'environ trois centimètres, reste collée au murmur comme si elle était munie d'une ventouse. Mais ses deux pattes arrière, mobilesmobiles et évoquant celles de l'araignéearaignée, poussent l'engin vers le haut, qui semble défier la pesanteur. La vidéo mise en ligne par ses créateurs le montre grimpant sur un mur intérieur mais ce robot peut aussi s'attaquer à une paroi en boisbois, une vitrevitre ou un mur de briques. Il vient de s'exhiber à Pasadena, devant les participants réunis pour l'édition 2008 de l'International Conference on Robotics and Automation, organisée par l'IEEE, vaste association d'industriels de l'électronique.

Ce robot, qui n'a pas reçu de nom de baptême, a été conçu par l'équipe de Harsha Prahlad, chez SRI International, un institut de recherche privé situé à Menlo Park, en Californie. Il existe déjà des engins de ce genre qui reprennent la méthode utilisée par le gecko, ce petit lézard qui courent sur les murs et même les plafonds. Son secret réside dans les poils microscopiques recouvrant ses pattes et générant des forces de Van der Waalsforces de Van der Waals, une interaction électrique s'exerçant à très faible distance, entre atomesatomes voisins.
, positives et négatives, sont incluses dans un crampon souple (<em>compliant clamp</em>). Entre deux électrodes, le champ électrostatique crée une force qui tend à appliquer les électrodes contre la paroi. © SRI International")
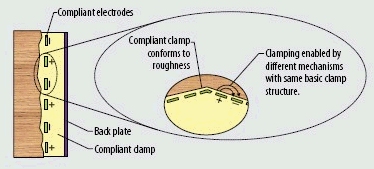
Les électrodes souples (compliant electrodes), positives et négatives, sont incluses dans un crampon souple (compliant clamp). Entre deux électrodes, le champ électrostatique crée une force qui tend à appliquer les électrodes contre la paroi. © SRI International
Un être humain marchera-t-il bientôt sur les murs ?
Celui de Harsha Prahlad, lui, utilise une force électrostatiqueélectrostatique. Ce principe, appelé électro-adhésion, consiste à générer de minuscules champs électrostatiques entre des petites électrodesélectrodes incluses dans une surface souple. Entre chaque couple d'électrodes (souples elles aussi), l'une positive et l'autre négative, apparaît une force d'attraction.
Le principe fonctionne sur n'importe quelle surface, même non conductrice et même si elle est recouverte de poussière, qui gêne beaucoup les appareils imitant le geckogecko. Un autre avantage, expliquent les chercheurs de SRI, est que l'adhésion peut être déclenchée et suspendue rapidement, par simple commutation électrique, en moins de 50 millisecondes.
Il grimpe vraiment...
Généré par une batterie, le champ électrostatique nécessaire consomme 20 microwatts pour environ cent grammes (1 newtonnewton) de poids soulevé. Le robot grimpeurgrimpeur génère ainsi une force d'adhésion de 0,5 à 1,5 newton. La vitessevitesse atteint 25 centimètres par seconde (la longueur du robot), soit 0,9 kilomètre à l'heure. En moins de trente secondes, cet alpiniste miniature sera parvenu au troisième étage d'un immeuble.
Les chercheurs envisagent toutes sortes d'applicationsapplications, pour l'inspection de bâtiments, à des fins militaires ou civiles, pour leur entretien ou pour des travaux sur un chantier. Il faudra encore quelques améliorations, par exemple le rendre autonome. Une autre voie de recherche est l'augmentation du poids transporté. A long terme, l'espoir est de porter un humain...










")



 portant chacune un millier de tiges terminées en spatules (spatular tips). © Ronald Fearing Lab./Dept. of Electrical Engineering/University of California, Berkeley")


. © Dall.E")






