
Lorsqu'ils sont de petite taille, les véhicules à roues ou à chenilles, et même les engins à jambes, éprouvent beaucoup de difficultés à se mouvoir sur des terrains accidentés. Alors pourquoi ne pas imiter la sauterelle ?
au sommaire


Le robot sauteur présenté à Pasadena. Crédit EPFL
Les petits robots éprouvent habituellement des problèmes insurmontables lorsque la rugosité d'un terrain augmente significativement. Cet effet, appelé Size Grain Hypothesis, démontre que l'influence sur la locomotion des irrégularités de surface est inversement proportionnelle à la taille de l'engin locomoteur. C'est d'ailleurs aussi pour cette raison qu'en terrain accidenté, des chenilles s'avèrent plus efficaces que de simples roues.
Mais les méthodes roulantes ou rampantes, ou même pédestres, possèdent leurs propres limites. Par exemple, une paroi verticale dont la hauteur dépasse celle du robot restera difficile à franchir, à moins de pouvoir s'y ancrer, ce qui soulève bien d'autres problèmes.
Pour résoudre cette difficulté, les chercheurs du Laboratory of Intelligent Systems, à l'EPFL (Ecole polytechnique fédérale de Lausanne), ont mis au point un ingénieux microrobot sauteur qu'ils viennent de présenter lors de la Conférence internationale sur la robotique et l'automatisation (ICRA’08)) à Pasadena, en Californie.
Un robot-sauterelle
Ce microrobot, qui pèse environ 7 grammes, a des allures de sauterellesauterelle. Et il n'a rien à lui envier puisqu'il est capable d'effectuer des bonds de 1,4 mètre, ce qui représente 27 fois sa taille. Il s'agit bien d'un exploit car tous les engins sauteurs mis au point jusqu'ici n'effectuaient des bonds proportionnellement dix fois moins importants.
Le secret de cette performance réside dans la conception même du dispositif. Dans la nature, les insectesinsectes sauteurs pratiquent une forme de stockage élastique de l'énergieénergie qui consiste à la recharger lentement puis à la libérer brutalement. C'est le principe de l'arc, que l'on bande avant de libérer la corde propulsant la flèche.
Le robot sauteur procède de la même façon : un petit moteur électrique stocke de l'énergie dans un ressort qui la libère au moment voulu. Mais cela ne suffit pas à accomplir de tels sauts, car comme un athlète s'entraînant pour battre un record, ce déploiement d'énergie doit encore être optimisé pour en améliorer le rendement par rapport à ce qui se faisait jusqu'à ce jour.
L'angle de décollage intervenant de manière significative dans le rendement de l'ensemble, les chercheurs ont effectué de nombreuses simulations et décidé d'un angle de départ de 75° sur l'horizontale. Afin d'optimiser le mécanisme de transmission entre le ressort et le système propulseurpropulseur (les jambes), ils ont aussi conçu un mécanisme répartissant le couple d'entrée de la force libérée en profils vertical et horizontal. Il est en effet très important pour les robots très légers de répartir dans le temps la libération de l'énergie, afin d'éviter que l'engin ne quitte le sol avant que toute la force ait été libérée et exploitée.

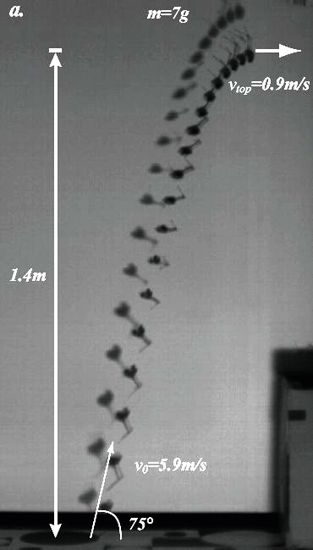
Robot sauteur en action. La hauteur atteinte est ici de 1,40 mètre.
Des perspectives pour l'exploration spatiale
Un réglage précis de la répartition des forces, qui pourra s'effectuer automatiquement dans le futur, permet aussi d'obtenir un excellent rendement sur des surfaces très glissantes, où un appui horizontal trop important peut amener des problèmes de frottement.
Pour cela, un système démultiplicateur actionnant un arbrearbre à camescames assure la tension du ressort dont la détente est transmise au système de répartition des forces. Les chercheurs ont opté pour un système de tringlerie à quatre barres pour les jambes, permettant d'ajuster l'angle de décollage et ainsi d'agir sur la distance franchissable tout en autorisant un compromis avec la hauteur atteinte, la duréedurée d'accélération ainsi que la linéarité de la force déployée. Le tout, rappelons-le, dans sept petits grammes...
La minuscule batterie embarquée permet à l'ensemble d'effectuer 320 sauts à intervalle de 3 secondes. Le prototype a été présenté le 21 mai dernier lors de la session Marche dynamique de l'ICRA à Pasadena, et sera exposé le 6 juin dans le Zoo des robots lors du quatrième International Symposium on Adaptive Motion of Animal and Machines à Cleveland (Ohio, Etats-Unis).
Les scientifiques estiment que des robots de ce genre pourraient être déployés en essaims afin de procéder à l'exploration systématique de zones difficilement accessibles, sur Terre ou sur d'autres planètes.

par Jean Etienne, Futura
le 25 mai 2008







")







, responsables de quelque 40 000 décès en France. © Ponchita, Adobe Stock")




")


