
au sommaire


La queue du thon... © MIT
Au début des années 1990, David Barrett, futur ingénieur en mécanique, est fasciné par les thonsthons. Ces grands poissonspoissons nagent à près de 80 kilomètres à l'heure si l'on en croit la littérature, une vitessevitesse difficilement accessible pour un engin sous-marinsous-marin fait de main d'homme. Pour sa thèse de doctorat, Barrett met au point un système de propulsion directement inspiré de l'anatomieanatomie de ce poisson. Baptisé Robotuna (qui, en français, donnerait robothon)), il agite la queue grâce à un mécanisme compliqué fait de câbles et de poulies. L'énergieénergie est fournie par des moteurs installés à l'extérieur du prototype, le banc de test se réduisant à un système propulsif fixé sous une quille plongée dans l'eau d'un bassin.

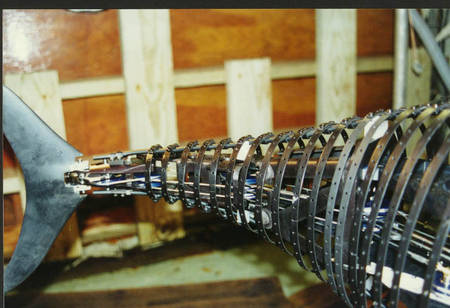
La première version de Robotuna, avec son armature métallique. © MIT
Devenu professeur d'ingénierie mécanique au Olin College, et vice-président de iRobot, David Barrett n'a pas abandonné l'idée de sa jeunesse et a su intéresser l'US Navy à son thonidé artificiel et même en obtenir une aide financière. Au sein du MIT (Massachusetts Institue of Technology) et avec une équipe de l'entreprise Boston Engineering, un robot, appelé Robotuna II, ou 2.0, pour rappeler la filiation directe avec le projet initial, est en cours de réalisation et sera prochainement livré à la marine américaine.
Sa structure est toujours proche de celle d'un poisson, avec une armaturearmature longiligne articulée en plusieurs parties, fonctionnant comme la colonne vertébralecolonne vertébrale. Mais la technologie a évolué depuis le premier prototype et la puissance mécanique est désormais intégrée à l'intérieur de l'engin. Les muscles sont bien là, réalisés en polymèrespolymères électroactifs, ou EAPEAP (electro-active polymers), fixés dans le sens de la longueur du robot. Ces matériaux ont la propriété de s'étendre ou se rétracter sous l'action d'une différence de potentiel électrique et sont souvent appelés muscles artificiels.


Robotuna II en cours de test, recouvert de sa peau de plastique. © MIT
Leur étude est récente et le JPL (Jet Propulsion LaboratoryJet Propulsion Laboratory, émanation de la NasaNasa), s'y intéresse particulièrement. Depuis 2005, les progrès en la matièrematière sont mesurés grâce à un original concours de bras de fer qui met en présence des humains et des systèmes articulés mis en mouvementmouvement par des EAP. En Suisse, l'Empa, un établissement public de recherche, qui envoie d'ailleurs ses réalisations au concours du JPL, travaille la question depuis plusieurs années et a testé un concept encore plus original : le dirigeable sans hélice qui, littéralement, nage dans l'airair en se tortillant grâce à ses muscles en EAP. Cette fois, aucun exemple vivant n'existe, la vie terrestre n'ayant pas inventé le plus léger que l'air...

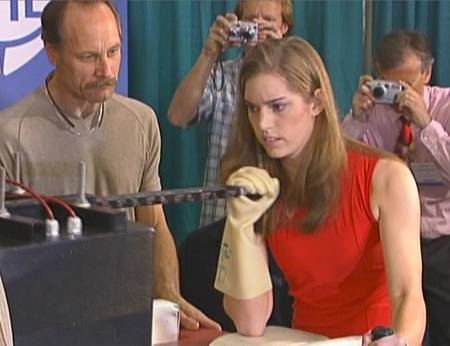
Panna Felsen, frêle étudiante de 17 ans, remporte, en 2005, le premier concours de bras de fer entre un être humain et un robot, organisé par le JPL à San Diego. En tant que muscles artificiels, les polymères électroactifs ont encore des progrès à faire... © JPL
Adaptés pour des missions longues
Nous n'en saurons pas beaucoup plus sur Robotuna. Pour ce projet financé par les militaires, les détails techniques sont donnés au compte-gouttes. On ne sait rien de la composition exacte des EAP utilisés ni sur la puissance consommée ou la vitesse obtenue.
Les performances des espècesespèces du genre Thunnus seront toutefois difficiles à égaler. Ces poissons montrent aussi un hydrodynamisme remarquable. Leurs yeuxyeux dépassent à peine ; alignés sur le dosdos, des spicules (sortes d'épines) viennent réduire les turbulencesturbulences générées par la nageoire dorsale ; les nageoires pelviennes et ventrales, inutilisées à grande vitesse, viennent se loger dans des anfractuosités, un peu comme rentre le train d'atterrissage d'un avion.
Mais, explique le communiqué de Boston Engineering, les militaires de la marine espèrent confier à un robot de ce genre des missions plus longues que celles des engins actuels. Ils pourraient par exemple porter des caméras ou des détecteurs de radioactivitéradioactivité. Ces thons mécaniques pourraient donc se multiplier (alors que leurs modèles vivants, eux, se portent nettement moins bien).

 chasse-neige coopèrent pour nettoyer la piste. © M. Saska, M. Hess, K. Schilling")







")






, responsables de quelque 40 000 décès en France. © Ponchita, Adobe Stock")




")


