
au sommaire
 chasse-neige coopèrent pour nettoyer la piste. © M. Saska, M. Hess, K. Schilling")
 chasse-neige coopèrent pour nettoyer la piste. © M. Saska, M. Hess, K. Schilling")
Quatre (faux) chasse-neige coopèrent pour nettoyer la piste. © M. Saska, M. Hess, K. Schilling
La neige a des conséquences majeures pour les grands aéroports internationaux car les phases d'atterrissage et de décollage deviennent vite dangereuses quand les pistes se recouvrent d'une couche glissante. Afin de déneiger rapidement les pistes ainsi que toutes les voies empruntées par les avions au roulage (les taxiways), des chercheurs allemands ont mis au point une escadrille de chasse-neige autonomes et coopératifs.
Ces robots, du moins des prototypes miniatures, ont été présentés lors de l'édition 2008 de l'International Conference on Robotics and Automation par des chercheurs de l'Université de Wuerzburg en Allemagne (Martin Saska, Martin Hess et Klaus Schilling). La première étape consiste à déterminer comment disposer au mieux les chasse-neige sur leur lieu de travail et à planifier leur travail, pour indiquer dans quel ordre s'occuper des voies. Pour cela, pistes et taxiways sont représentés sous la forme d'un graphe. Le parcours est planifié de sorte que les chasse-neige passent par toutes les voies en un temps minimum, garantissant que l'aéroport sera déneigé le plus rapidement possible. C'est la planification de parcours.
 viennent d'être reprises par le deuxième robot (à gauche). © M. Saska, M. Hess, K. Schilling")
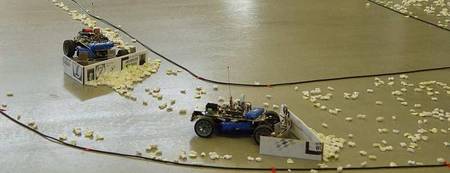
Ces chasse-neige miniatures poussent devant eux les boules de polystyrène qui encombrent la piste. Celles qu'a chassées le leader (à droite) viennent d'être reprises par le deuxième robot (à gauche). © M. Saska, M. Hess, K. Schilling
S'aider les uns les autres
Evacuer complètement la neige d'une piste représente une mission moins facile qu'il n'y paraît, surtout pour un robot... Ce travail impose des contraintes spécifiques qui ne peuvent pas être prises en compte par les algorithmes classiques de planification. Par exemple, la neige sera poussée latéralement par la pelle d'un chasse-neige et restera sur la piste. Il faut donc un ou plusieurs véhicules supplémentaires sur le côté afin de pousser la neige jusqu'aux bords des pistes. Pour mettre au point une telle coordination des mouvementsmouvements, la position et l'orientation des pelles ont été prises en compte. De plus, le système proposé est capable de réagir intelligemment aux virages ou aux rétrécissements de voies.
Afin de tester leur algorithme, cette équipe de chercheurs a construit un aéroport miniature. Les véritables chasse-neige sont remplacés par plusieurs petits robots équipés de pelles et la neige par des boules de polystyrènepolystyrène. Les résultats obtenus sont impressionnants et leur ont valu d'être finalistes du Kuka Service Robotics Best Paper Award.
Cet exemple concret illustre idéalement les progrès en cours dans le travail collaboratif des robots, une idée très en vogue et un principe très efficace. Une escadrille d'engins assez simples, éventuellement différents, peut réussir bien mieux qu'un appareil hautement sophistiqué. Un tel groupe résiste mieux aux pannes (si un robot flanche, un autre prend la relève) et s'adapte à des conditions plus variées.

par Jean-Charles Bazin, Futura
le 11 juin 2008







")







, responsables de quelque 40 000 décès en France. © Ponchita, Adobe Stock")




")


