
















au sommaire
Le cafard, aussi appelé blatte, est parfois considéré comme un nuisible. Des chercheurs du laboratoire de Berkeley ont pourtant voulu le reproduire en robotiquerobotique, afin d'imiter ces capacités de rapiditérapidité dans le déplacement soit environ 50 fois la longueur de son corps par seconde.


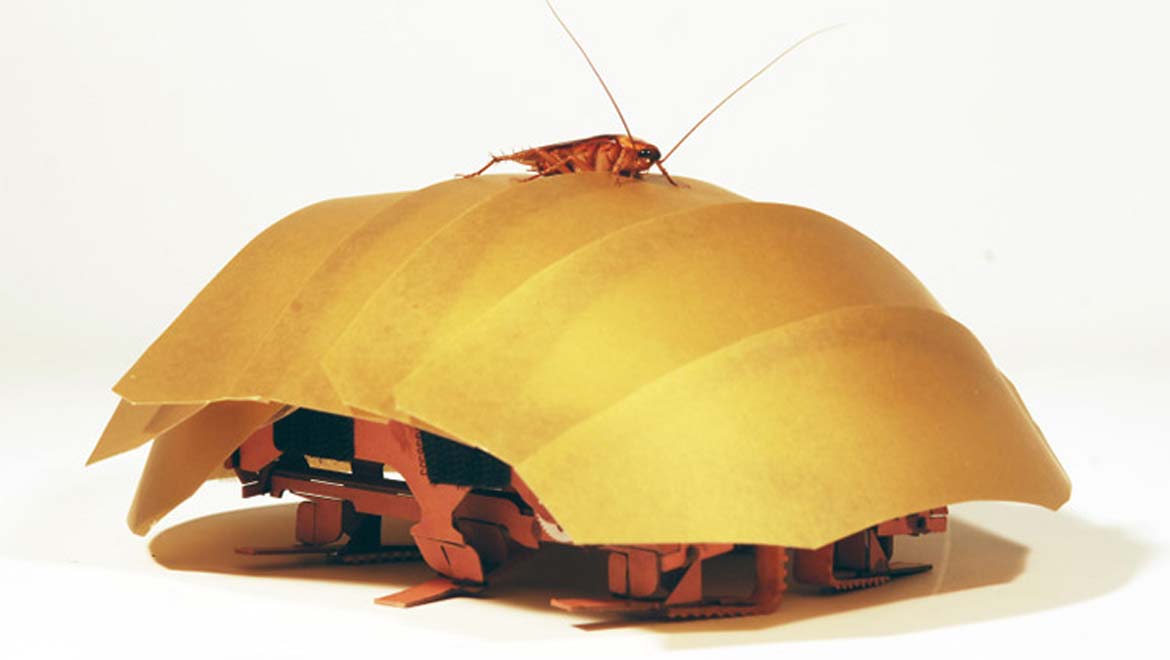
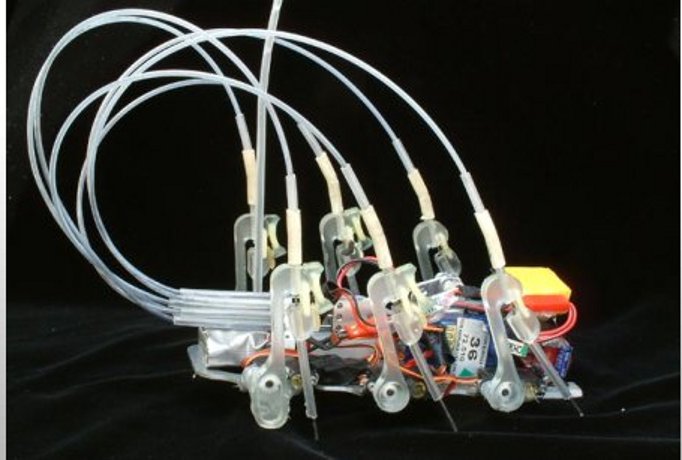
La réalisation a donné X2-Velociroach, qui doit cependant être muni de stabilisateurs pour ne pas s'envoler. Une petite carapace a été ajoutée au robotrobot CRAM de l'université d'Harvard afin qu'il puisse s'immiscer sans dommage dans les éboulis d'un tremblement de terretremblement de terre afin d'y rechercher des victimes.


Les Sprawls : la vélocité des cafards
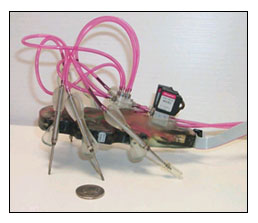
Au laboratoire PolyPEDAL à Berkeley, des chercheurs ont utilisé les principes locomoteurs des cafards pour concevoir la série des Sprawls, les plus véloces des robots hexapodeshexapodes. Ils sont néanmoins encore dix fois moins rapides que leurs modèles, les cafards, qui se déplacent de cinquante fois la longueur de leur corps par seconde ! Les Sprawls constituent néanmoins une belle prouesse pour les chercheurs de Berkeley.












. Lorsqu’ils rencontrent une personne, leurs capteurs à ultrason les avertissent. Ils se mettent alors automatiquement en veille.
© Murata")












