

au sommaire
ERA est le bras robotiquerobotique de l'Agence spatiale européenneAgence spatiale européenne dévolu au segment russe de la Station spatiale internationale (ISS). Avec le laboratoire scientifique ColumbusColumbus et le Véhicule de transfert automatique (ATV), ERA est le troisième élément majeur de la participation européenne à la constructionconstruction de la Station spatiale internationale. ERA (pour European Robotic Arm, en anglais) a été lancé en juillet 2021. Très en retard sur son planning initial - il aurait dû être lancé en 2007 - ce bras a été construit par un consortium européen, dirigé par Airbus Defence and Space. Il complète les deux autres bras de la Station dont le bras robotique Canadarm2 qui ne peut pas accéder à la totalité de cette partie de l'ISS. Sa mise en service a débuté en avril 2022 avec la sortie dans l'espace de deux cosmonautes russes qui l'ont déballé et lui ont fait faire quelques mouvements pour s'assurer de son bon fonctionnement.
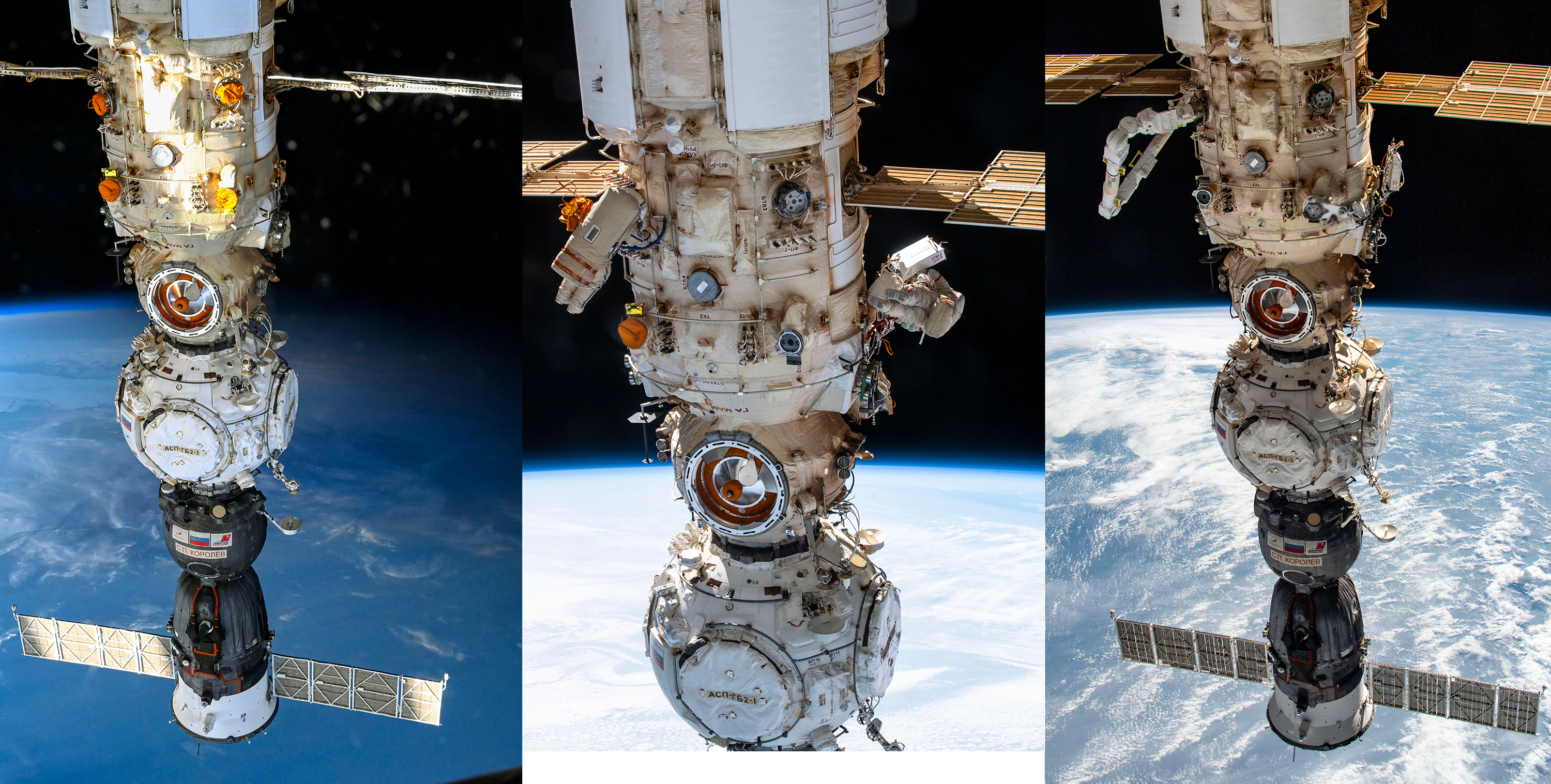
 et préparent un des points d'accroche (à gauche). Sur l'image de droite, on peut voir le bras partiellement déployé. © Nasa")
Un bras robotique qui s'inspire des bras humains mais en beaucoup plus polyvalent
Bien que très différent du Canardam2, ERA est très complémentaire. Long de 11,3 mètres pour un poids de 680 kilos, il peut déplacer des masses très importantes, de trois tonnes en routine jusqu'à huit tonnes en mode lent. Ce bras symétrique et à deux mains peut se déplacer en avant ou en arrière sous son propre contrôle, d'une main à l'autre, d'un point fixe à un autre. Les sept articulationsarticulations robustes et précises d'ERA, les membres légers et l'ordinateurordinateur de contrôle situé au milieu du bras confèrent au bras robotique sa polyvalence. ERA sera utilisé pour une très grande variété de tâches comme le remplacement de panneaux solaires, l'inspection voire l'assemblage de modules et facilitera le déplacement des astronautes effectuant des sorties dans l'espace. Avec ses caméras infrarougesinfrarouges, il pourra inspecter la surface extérieure de la station (vieillissement des revêtements de protection, impacts de micrométéorites, vérification des attaches des modules, des palettes...)).

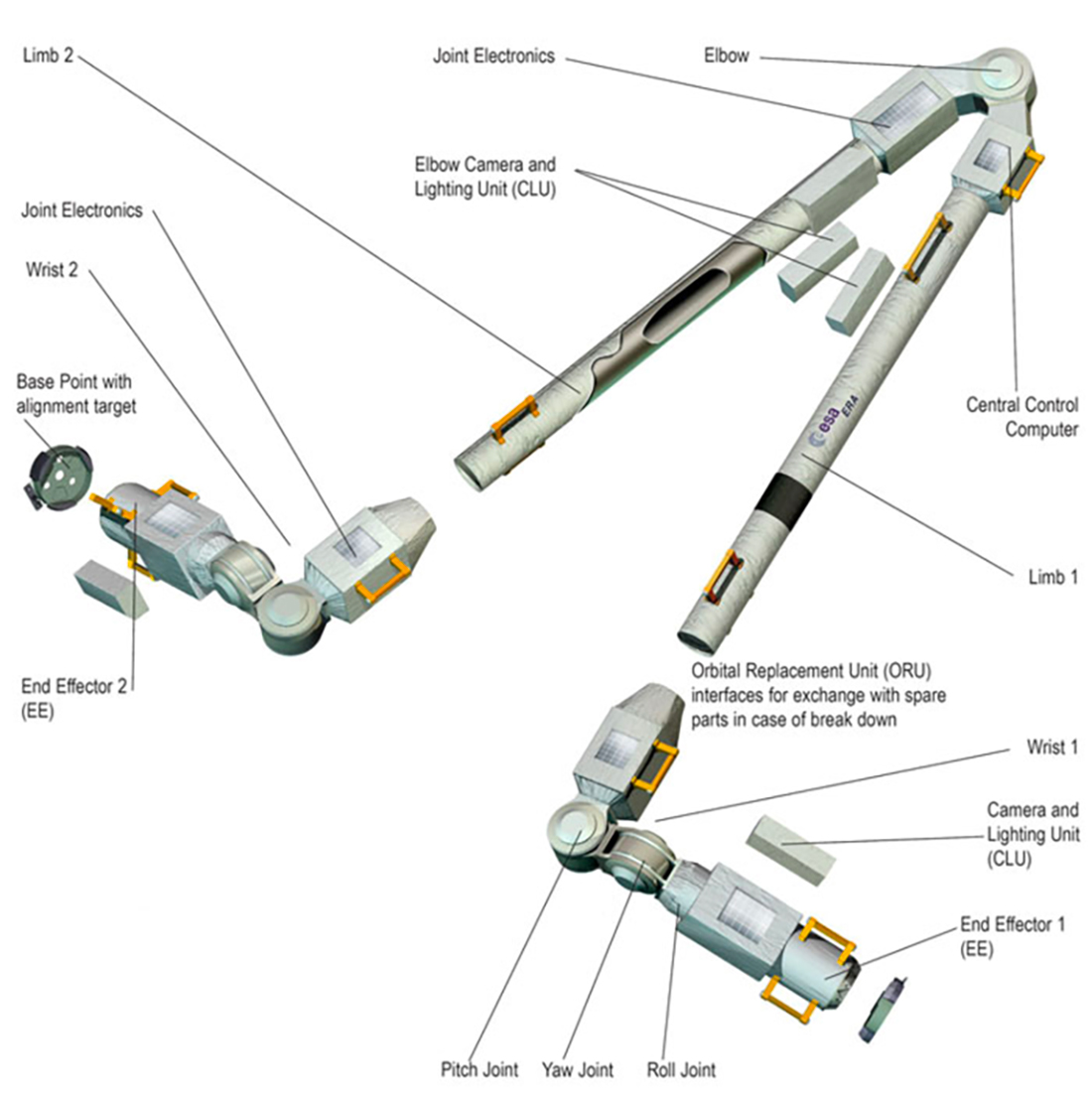
Selon les besoins des astronautes, ERA sera contrôlé depuis l'intérieur ou l'extérieur de la Station, en temps réel ou programmé à l'avance. Avec ses articulations, ERA ressemble à une sorte de bras humain. Il est actionné par des moteurs et des câbles. Il est symétrique, en ce sens que des deux côtés du « coude », on trouve deux « muscles » et deux « poignets ». Ses extrémités sont capables de s'accrocher à la station, ce qui lui confère un rayon d'actions important tout autour de la partie russe. Il se déplacera en s'accrochant par une extrémité, puis une autre. Enfin, il est doté de nombreux outils dont une plateforme comportant cale-pieds et mains courantes de façon à transporter des astronautes lors de leurs sorties extravéhiculaires.

. Ce bras, clairement visible à droite de l'image est installé sur le segment russe de la Station spatiale. © Nasa")


 dispose désormais de nouveaux moyens de tester la réaction du corps humain à l’apesanteur. Ici, des lits en immersion sèche, du côté de Toulouse (France). © Rémi Benoit, Cnes")











