











au sommaire
Comme c'est le cas pour toutes les recherches sur les systèmes complexes, on est en droit de se demander si la vie artificielle poursuit d'autres objectifs que la réalisation de modèles élégants, voire fascinants, mais finalement bien incapables de nous aider dans le monde réel.



Des robots autocréés capables de coloniser une planète ?
Dès ses débuts, la vie artificielle affichait des objectifs tout à fait pragmatiques. Cela fait longtemps que certains imaginent que les différentes recherches sur les automatesautomates autoreproducteurs, entamés dès les années 1950 par Jon Von Neumann et poursuivies par Chris Langton, puissent un jour aider à produire des « usines autocréées » susceptibles, par exemple, d'être envoyées sur la Lune ou d'autres planètes où elles pourraient générer leurs propres composants, se reproduire et exploiter la surface du sol extraterrestre, préparant peut-être un jour l'arrivée des humains...
Par exemple, le roboticien Rodney Brooks a eu l'idée de faire coloniser l'espace par des robotsrobots fast, cheap and out of control (rapides, pas chers, et hors de contrôle) des meutes d'agents machiniques, disposant chacun d'une intelligence artificielleintelligence artificielle très réduite, mais qui collectivement devaient pouvoir effectuer des prouesses.
Des machines qui évoluent
Au colloque Ecal 2011, Jordan Pollack et Jeff Clune, ont chacun exposé leurs idées sur la fabrication automatique.
Pollack a raconté comment il a mis au point, avec son équipe de l'université Brandeis, trois générations de machines autoassemblées.
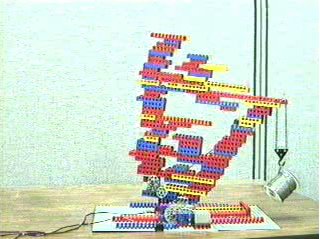
Avec la première, il s'agissait de produire des systèmes stables à partir de briques Lego. La procédure n'était pas entièrement automatique ; on utilisait un système virtuel qui traçait des plans de la machine à construire. Puis, on assemblait celle-ci à la main. Le système logiciellogiciel s'appelait EvoCAD. Il est encore disponible sur la page du laboratoire Demo que dirige Pollack.
Son principe est simple : vous disposez de briques Lego (virtuelles) que vous placez les unes sur les autres sur un espace bidimensionnel. Après cela, le système teste votre constructionconstruction et cherche à l'optimiser pour la rendre la plus stable possible, en fonction de paramètres liés à la gravité, au poids, etc. Il ne reste plus ensuite qu'à assembler l'objet... manuellement. Reste que les objets mis au point par cette méthode se rapprocheraient plutôt de constructions industrielles classiques, de type grues ou ponts (voir vidéo)).
La deuxième génération était plus proche de ce qu'on appelle les robots proprement dits, et se déroulait également en deux phases, l'une virtuelle et l'autre réelle. Il s'agissait de construire des robots à l'aide, essentiellement, de tubes articulés et d'évaluer leur capacité de déplacement dans l'espace. On commençait par un système de vie artificielle qui testait et faisait évoluer les robots dans un univers 3D : on utilisait pour cela les algorithmes génétiquesgénétiques, processus par lequel les meilleurs résultats d'un programme de génération (plus ou moins) aléatoire sont sélectionnés et remis en compétition jusqu'à ce que les gagnants atteignent une efficacité optimale. L'idée n'est pas neuve. Elle a déjà été explorée par l'artiste Karl Sims dans les années 1990. Lorsqu'une forme assez intéressante avait été obtenue, il était facile de construire le robot, puisque ses éléments de base étaient simples et connus. Vous pouvez voir dans ces vidéos le passage de ces robots du virtuel au réel.
La troisième génération sera celle des L-systems, les chaînes de Lindenmayer, présentées dans la page suivante.

par Rémi Sussan














. Lorsqu’ils rencontrent une personne, leurs capteurs à ultrason les avertissent. Ils se mettent alors automatiquement en veille.
© Murata")


.")





