

au sommaire
Attraper un objet, même inconnu, le manipuler sans le faire tomber est naturel pour tous les humains. Ce qui apparaît simple et évident, même pour les enfants en bas âge, présente d'énormes difficultés pour les robots. L'apprentissage naturel est long et les manipulations d'objets sont souvent hasardeuses. Avec Adroit Manipulation Platform, des chercheurs de l'université de Washington avaient déjà conçu une main robotisée à cinq doigts, dotée d'une grande adresse. Elle était capable elle-même d'améliorer sa dextérité, grâce à une intelligence artificielle (IA). Aujourd'hui, c'est OpenAI, une organisation à but non lucratif, pilotée par le patron de Space-X et TeslaTesla, Elon MuskElon Musk et Sam AltmanSam Altman, qui dévoile sa main robotisée dopée à l'IA.
Baptisée Dactyl, la main est capable de faire pivoter un cube dans la paume avec l'ensemble des doigts. De même, les doigts peuvent le faire glisser latéralement sur la surface de la main, ou encore le faire tourner à plat dans cette même paume. Pour aider la main, trois caméras couleurscouleurs permettent au « cerveaucerveau » de ce robot d'appliquer les mouvementsmouvements et les corrections nécessaires avec les doigts. Cela paraît simple, mais c'est en réalité une véritable prouesse !
Des contraintes physiques qui entravent les simulations
Sur leur blog les scientifiques expliquent que l'apprentissage par l'expérience fonctionne très bien dans les simulations et les jeux vidéo. Dans cette situation, il suffit de tester virtuellement un maximum de scénarios en un minimum de temps. Mais lorsqu'il s'agit de faire interagir un robot avec des éléments du monde réel, c'est bien plus laborieux. Les contraintes physiquesphysiques viennent entraver la simulation. Par exemple, malgré la présence de trois caméras, les doigts se masquent eux-mêmes ou sont parfois cachés par l'objet. De même, le frottement ou le glissement du cube ne peuvent pas être observés et le système d'analyse doit les déduire. Au final, l'IA de Dactyl doit donc apprendre à manipuler un objet avec des informations partielles.
La modélisationmodélisation devient alors très compliquée pour l'IA et les stratégies à appliquer sont presque impossibles à transférer à un robot. En réalité pour que cela fonctionne correctement, il faudrait des années d'expérimentation physique pour que l'IA puisse élaborer les bonnes stratégies pour manipuler précisément le cube.
La main développée par OpenAI est capable de faire tourner un cube entre ses doigts avec une dextérité naturelle. Il ne lui échappe en moyenne que toutes les 13 sessions d’exercices. La main est parvenue à un record de 50 exercices consécutifs sans que le cube ne tombe. Elle peut très bien réaliser la même opération avec un autre objet. © OpenAI
100 ans d'apprentissage en seulement 50 heures
Pour contourner ces contraintes, les chercheurs se sont appuyés sur un algorithme déjà exploité pour un robot, baptisé OpenAI Five. Sa spécialité est l'apprentissage des jeux vidéo. Ils ont d'abord laissé la main robotisée faire de nombreuses tentatives de manipulation d'un cube. Les doigts devaient le déplacer de façon à ce qu'un côté précis se trouve vers l'avant de la main. Ensuite, ils ont ajouté progressivement des modifications sur ce même cube. Ils ont changé ses couleurs, son poids, sa taille, et même la couleur de la main. C'est en se concentrant sur ces nuances que l'IA a pu simuler la manipulation d'objets dont les caractéristiques sont aléatoires. Pour éviter que cela dure des années, c'est l'équivalent de 100 ans d'expérimentations qui ont été cumulés en seulement 50 heures. Pour cette phase d'apprentissage, il a fallu doper les algorithmes avec pas moins de 6144 CPU et 8 GPU.
Fait important, avec ce procédé, Dactyl peut attraper et manipuler toutes sortes d'objets nouveaux. Il adapte son expérience précédente à la forme du nouvel objet.
La main robotisée qui apprend toute seule
Article de Marc ZaffagniMarc Zaffagni publié le 16/05/2016
Pour un roboticien, reproduire les mouvements d'une main est un casse-tête. Pour mieux le résoudre, des chercheurs nord-américains ont créé une main robotisée qui sait améliorer sa dextérité sans intervention humaine, grâce à un algorithme d'apprentissage automatique.
En robotique, la main est l'une des parties les plus complexes à maîtriser. Il faut combiner un haut degré de mobilité, une réactivité et une précision susceptibles de s'approcher des performances d'une main humaine. De grands progrès ont été accomplis en ce qui concerne la dextérité, la vitessevitesse (avec notamment une main robotisée imbattable au chifoumi) ou encore la sensibilité au toucher.
De nombreux gestes simples, que nous effectuons quotidiennement avec nos mains, restent de véritables gageures techniques pour les roboticiens. Cependant, rien n'est impossible, comme vient de le démontrer une équipe de l'université de Washington (University of Washington, UW). Ses chercheurs ont conçu une main robotisée à cinq doigts qui fait montre d'une grande adresse. Surtout, grâce à une intelligence artificielle (IA), elle est capable d'améliorer sa dextérité sans intervention humaine.
Pour concevoir cette Adroit Manipulation Platform, les experts de l'UW ont dû relever plusieurs défis. À commencer par la conception d'une main robotisée susceptible d'offrir une flexibilité et une réactivité à même d'imiter une main humaine. Pour cela, les chercheurs sont partis sur la base de la Shadow Dexterous Hand, un modèle de main artificielle fabriquée par l'entreprise britannique The Shadow Robot Company.

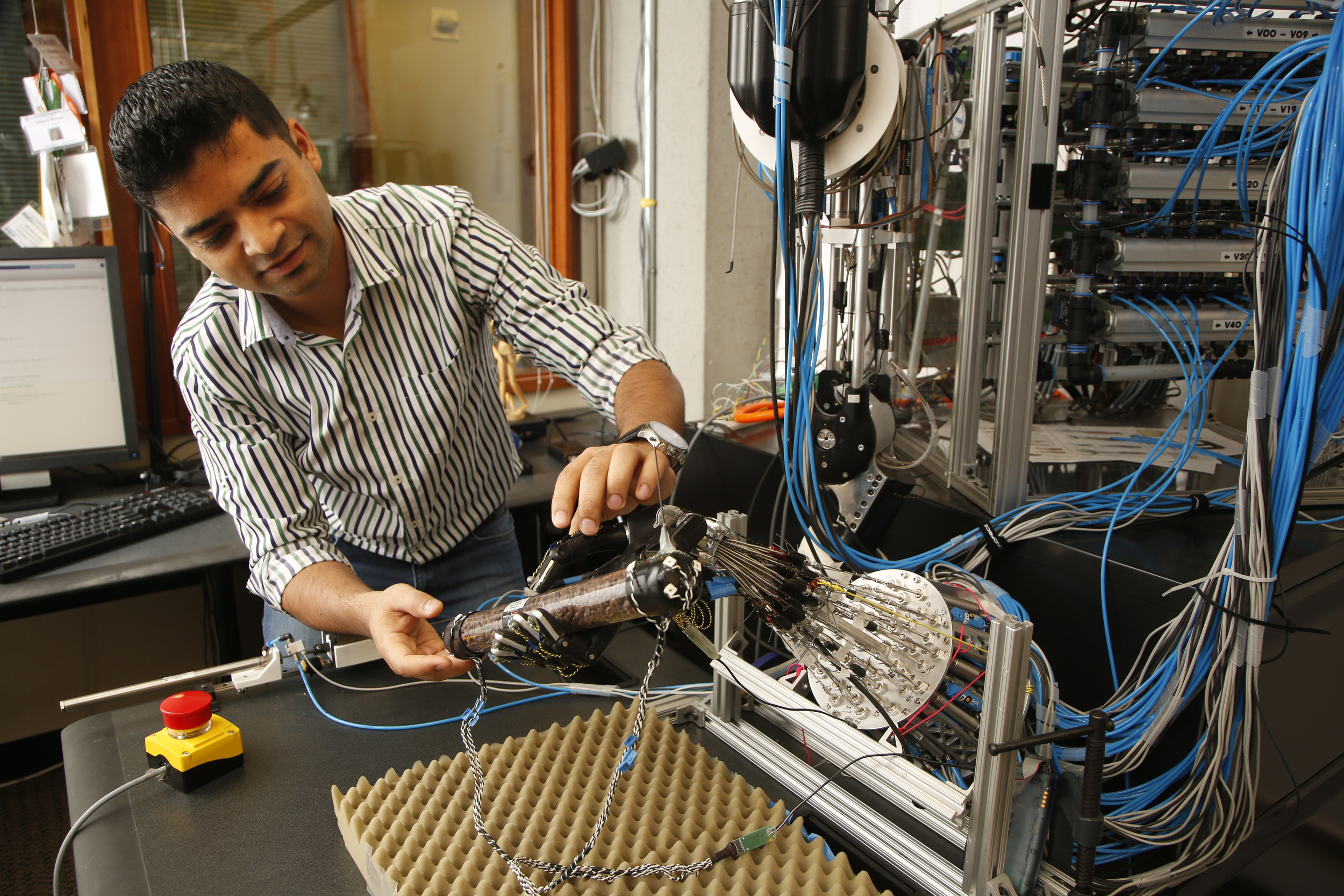
La main robotisée dispose de 24 degrés de liberté qui sont actionnés par une quarantaine de tendons dépendant d'un système pneumatique. © University of Washington
Elle fait fonctionner toutes ses articulations en moins de trois secondes
Animée par un système pneumatiquepneumatique qui actionne 40 tendons, elle a une taille et une forme comparables à celles d'une main humaine et en reproduit tous les degrés de liberté. La version conçue par l'équipe de l'UW est extrêmement véloce. Dans cette vidéo de démonstration disponible sur YouTube, il ne lui faut que 2,44 secondes pour faire fonctionner toutes ses articulationsarticulations les unes après les autres.
Puis, les chercheurs ont développé un algorithme d'apprentissage automatique (machine learningmachine learning) permettant de modéliser des mouvements de main complexes, impliquant les cinq doigts, et de déterminer la combinaison la plus adaptée en fonction des tâches à accomplir telles que taper sur un clavierclavier ou lâcher un bâton et le rattraper en l'airair.
Après avoir été éprouvée sur un ordinateurordinateur, cette IA a été associée à la main artificielle pour la faire fonctionner en conditions réelles. Le fonctionnement est le suivant : le système récolte les données émises par 130 capteurscapteurs et des caméras de capture de mouvement puis les insère dans l'algorithme d'apprentissage automatique qui va ainsi affiner ses modèles existants. La vidéo montre comment, sans intervention extérieure, la main devient de plus en plus apte à faire tournoyer entre ses doigts un tube de plastiqueplastique rempli de grains de café.
La prochaine étape va consister à développer une capacité d'apprentissage plus étendue afin que la main robotisée puisse gérer des objets et des scénarios de manipulation dont elle n'a pas une connaissance préalable.
Cette innovation peut potentiellement faire progresser la robotique dans de nombreux domaines tels que l'industrie, la manutention, la chirurgiechirurgie ou les services à la personne. Le principal obstacle réside dans le coût de fabrication élevé de cette main qui avoisine les 300.000 dollars (plus de 263.000 euros au cours actuel). Pour le moment, l'équipe de l'UW compte se concentrer sur le développement de sa plateforme et n'évoque pas de projet commercial.
Ce qu’il faut
retenir
- C'est en appliquant des modifications sur un objet physique manipulé par la main robotisée que l'algorithme de l'IA conçu par OpenAI est capable de créer des simulations performantes.
- L'IA a pu simuler jusqu'à 100 ans de manipulations en seulement 50 heures.

par Sylvain Biget, Futura
le 5 août 2018


, la séquence démarrait au moment où l’humain finissait son geste, ce qui laissait penser que le robot trichait. Dans la version mise à jour (identifiée en rouge), on voit que la séquence débute plus tôt et se termine quasiment en même temps que celle du joueur humain. © Université de Tokyo, Ishikawa Oku Lab")

 ? © phonlamaiphoto, Adobe Stock")










. © Dall.E")






