





au sommaire
Le développement actuel des micro et nanotechnologiesnanotechnologies est considérable, et les applications potentielles intéressent un très grand nombre de domaines, comme la physique des matériaux, les technologies pour la santé ou l'électronique. Mais le propre de ces technologies (leur échelle) les rend problématiques. C'est là qu'entre en jeu l'haptiquehaptique.


Problématiques liées aux échelles nano et micro
À cette échelle, l'interaction directe avec les objets est impossible du fait notamment de leur taille, des champs de forces complexes et non intuitifs, et de la grande sensibilité des systèmes aux conditions environnementales. Une solution consiste à automatiser l'ensemble des tâches. Cependant, le manque de flexibilité qui en résulte, et l'impossibilité de bénéficier de l'expertise des opérateurs au cours d'une manipulation sont autant de facteurs pénalisants.
La solution : les interfaces haptiques
Pour garantir l'interactivité, l'utilisation d'interfaces à retour d'effort, ou interfaces haptiques, est une solution prometteuse. L'opérateur contrôle alors les outils à l'aide du bras maître, par lequel lui sont transmis notamment les efforts d'interaction (voir figure ci-dessous).

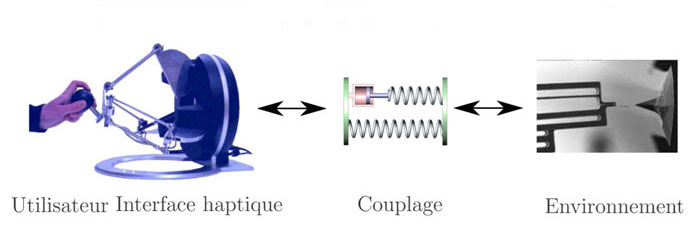
Les principales caractéristiques de l'interface sont le nombre de degrés de liberté en mouvement et en retour d'effort, ainsi que les efforts maximaux transmissibles à l'utilisateur. Ce bras doit posséder une large bande passantebande passante pour faire ressentir des changements d'efforts brusques, et des frottements réduits. Le contact simulé doit être raide. L'espace de travail est également à prendre en considération. Il existe actuellement de nombreuses interfaces haptiques, à l'état de prototypes ou disponibles dans le commerce.






")
 d'une reproduction micrométrique de la porte de Brandebourg ont été réalisées à seulement 50 femtosecondes d'intervalle. © HZB/Eisebitt")

 mesurant la force nécessaire pour déplacer un atome de cobalt sur une surface cristalline. Crédit : IBM.")
 piégée par un laser. Les mesures réalisées confirment des prédictions issues d'un théorème découvert au début des années 1990. © J. Adam Fenster, université de Rochester")








