





au sommaire
Trois types de téléopérationtéléopération sont donc définis, selon l'objet réel ou virtuel considéré : la téléopération directe, virtuelle et augmentée.




La téléopération directe
L'opérateur agit à l'aide de l'interface haptiquehaptique sur un robotrobot esclave qui manipule l'objet réel. Nous nous intéressons ici à des objets ayant des tailles comprises entre quelques micromètresmicromètres et quelques dizaines de micromètres, et à des efforts d'interaction compris entre quelques dixièmes de nanonewton et quelques micronewtons. Pour agir sur de tels objets, un système de manipulation robotisé est nécessaire.
La téléopération virtuelle
L'opérateur manipule un objet virtuel dans un environnement également virtuel.
La téléopération augmentée
Elle consiste à combiner les deux solutions précédentes. L'opérateur interagit avec un objet virtuel dans une scène virtuelle qui représente la scène réelle. La simulation est couplée avec la plate-forme de micromanipulation, afin que les actions de l'utilisateur soient utilisées par la simulation pour manipuler l'objet réel.
L'intérêt principal de ce type de téléopération est de fournir à l'utilisateur des indications qui ne sont pas directement disponibles par les mesures pour l'assister lors d'une tâche de manipulation. Un exemple classique est celui de la reconstruction des efforts à l'aide d'images provenant d'un microscopemicroscope, dont la fréquence d'acquisition est trop faible pour qu'elles soient utilisées dans le calcul d'un retour haptique.
, virtuelle (l'opérateur manipule des objets virtuels) et augmentée (couplage entre le logiciel de simulation et la scène réelle). © ISIR")
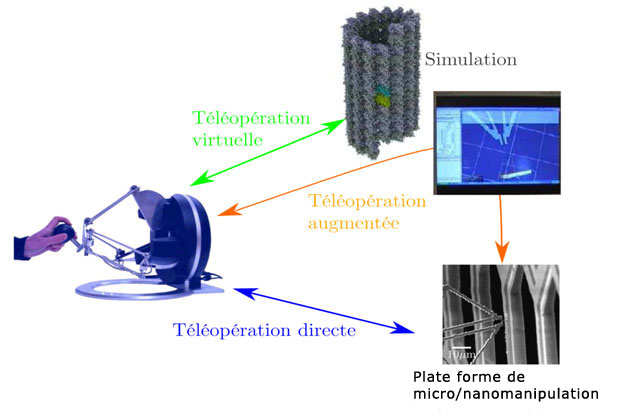
Les éléments nécessaires à un système de téléopération dépendent du type de téléopération réalisée. Les téléopérations directe et augmentée nécessitent une plate-forme de micromanipulation. Pour les téléopérations augmentée et virtuelle, un logiciellogiciel de simulation est nécessaire.

. L'image apparaît à travers un système optique porté par le navigateur devant ses yeux. © Wisdom Tooles")











