au sommaire
Les activités de recherche présentées ici concernent les interactions contrôlées de l'échelle de la cellule (micro) à l'échelle de la molécule (nano).

À l'échelle microscopique, la microrobotique couvre des domaines de recherche comme la microphysique, la microfabricationmicrofabrication, la perception des forces et les stratégies dextres de manipulation. Les champs d'application sont principalement la biologie cellulairebiologie cellulaire, les microsystèmes et la physique des surfaces.
À l'échelle nanoscopique, la nanorobotique étend ses champs de recherche aux forces intermoléculaires, à l'imagerie, aux systèmes intégrés et aux nanorobots autonomes.
Les champs d'application visés sont les nanosystèmes, la physique des membranes et la biologie des organismes.
. Balance modifiée des forces, les forces surfaciques sont prépondérantes par rapport aux forces volumiques. Manipulation par différents phénomènes physiques : adhésion, succion, forces électrostatique, thermique (b à f). © ISIR")
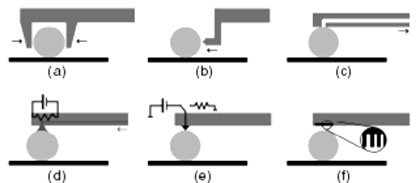
À ces échelles, différentes problématiques apparaissent
- Les forces surfaciques sont prépondérantes par rapport aux forces volumiques. De même, la modélisation et la compréhension des phénomènes mis en jeu sont totalement méconnues et les limites de la physique classique à la physique atomique ne sont pas clairement identifiées.
- Les composants de base des systèmes avancés ne sont pas dédiés ni définis pour interagir avec la physique du nanomonde. Par exemple, la vision des scènes est complexe car les limites de l'optique sont dépassées.
- Les commandes référencées capteurscapteurs ne sont pas performantes car des problématiques nouvelles apparaissent, comme le rapport signal/bruit défavorable ou la calibration des systèmes.
- L'interaction ressentie dans le nanomonde est rendue complexe par des problèmes d'homothétie non linéaire. Ainsi, la fidélité des efforts et la stabilité des systèmes téléopérés à ces échelles sont des problèmes ouverts.
- La micro/nanomanipulation d'objets artificiels ou biologiques est ainsi à ses balbutiements et intéresse des problèmes trop simplifiés. Dans ce cadre, les différents apports de ma recherche peuvent être synthétisés et sont décomposés en trois classes de domaine :
- phénomènes physiques : contribution à la définition de modèles d'analyse de phénomènes microphysiques, mise en évidence de nouveaux phénomènes convectifs pour la manipulation sans contact, étude de la mécanotransduction par des excitations et des mesures des raideurs de cellules ;
. Mise en évidence de l'effet Marangoni (b). © ISIR")
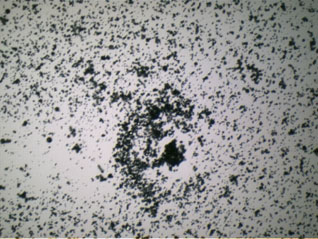

- micro/nanomanipulation : nanomanipulation parallèle en environnement ambiant par microscopie à force atomique d'objets nanométriques, nanomanipulation automatisée spatiale de nanotubesnanotubes ou de nanofils, conception de nanosystèmes hélicoïdaux pour la mesure des forces d'interaction ;
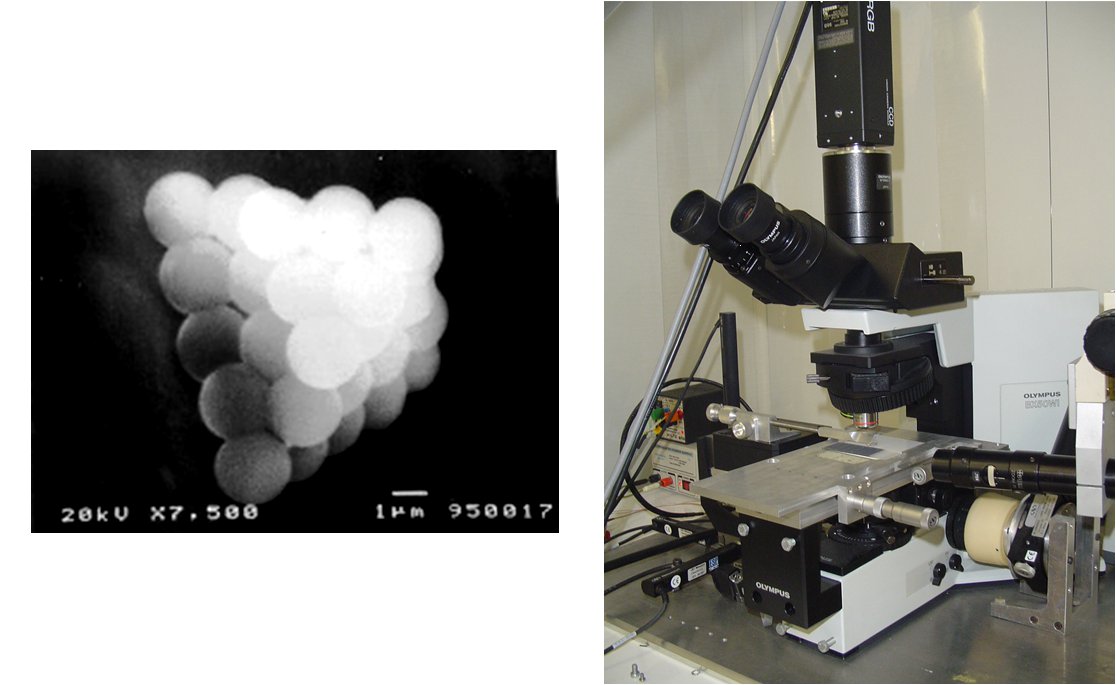
. Manipulation par spectroscopie d'efforts de nanotube de carbone (b). Manipulation parallèle de nanosphères de rayon 15 nm (c). © ISIR")
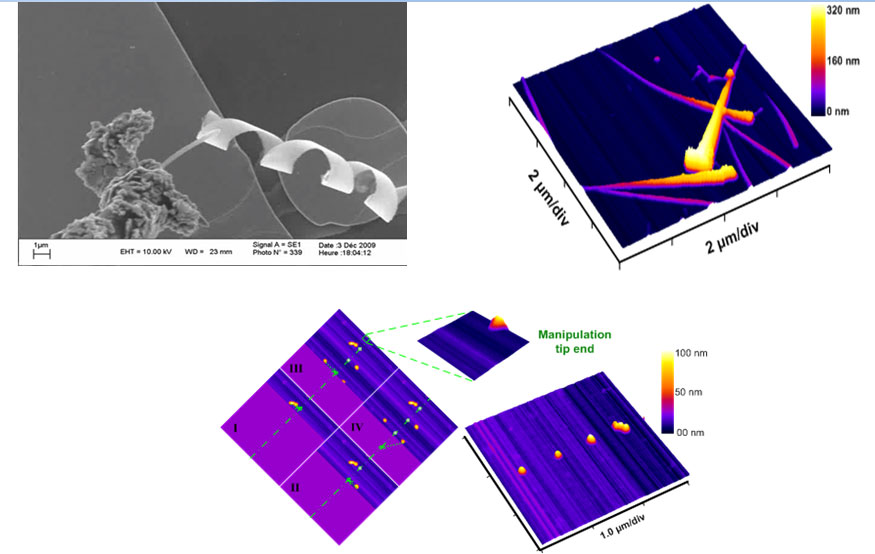
Illustration des recherches dans le domaine de la micro/nanomanipulation. Caractérisation d'un nanotube de carbone par un capteur hélicoïdal (a). Manipulation par spectroscopie d'efforts de nanotube de carbone (b). Manipulation parallèle de nanosphères de rayon 15 nm (c). © ISIR
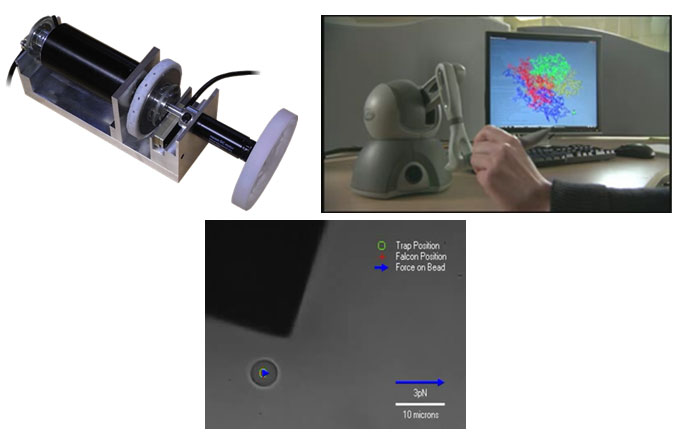
- haptiquehaptique pour le nanomonde : conception d'une interface haptique haute fidélité et évaluation utilisateur pour la compréhension des phénomènes nanophysiques, manipulation spatiale avec retour d'effort stable d'objets micro et nanoscopiques, plate-forme haptique de simulation moléculaire, retour d'effort pour piège optique.
. Haptique pour la simulation moléculaire (b). Retour d'effort pour le piège optique (c). © ISIR")