







au sommaire
Plus que des réponses, ce dossier donne un aperçu des difficultés liées au développement de robotsrobots amenés à évoluer dans des environnements humains.

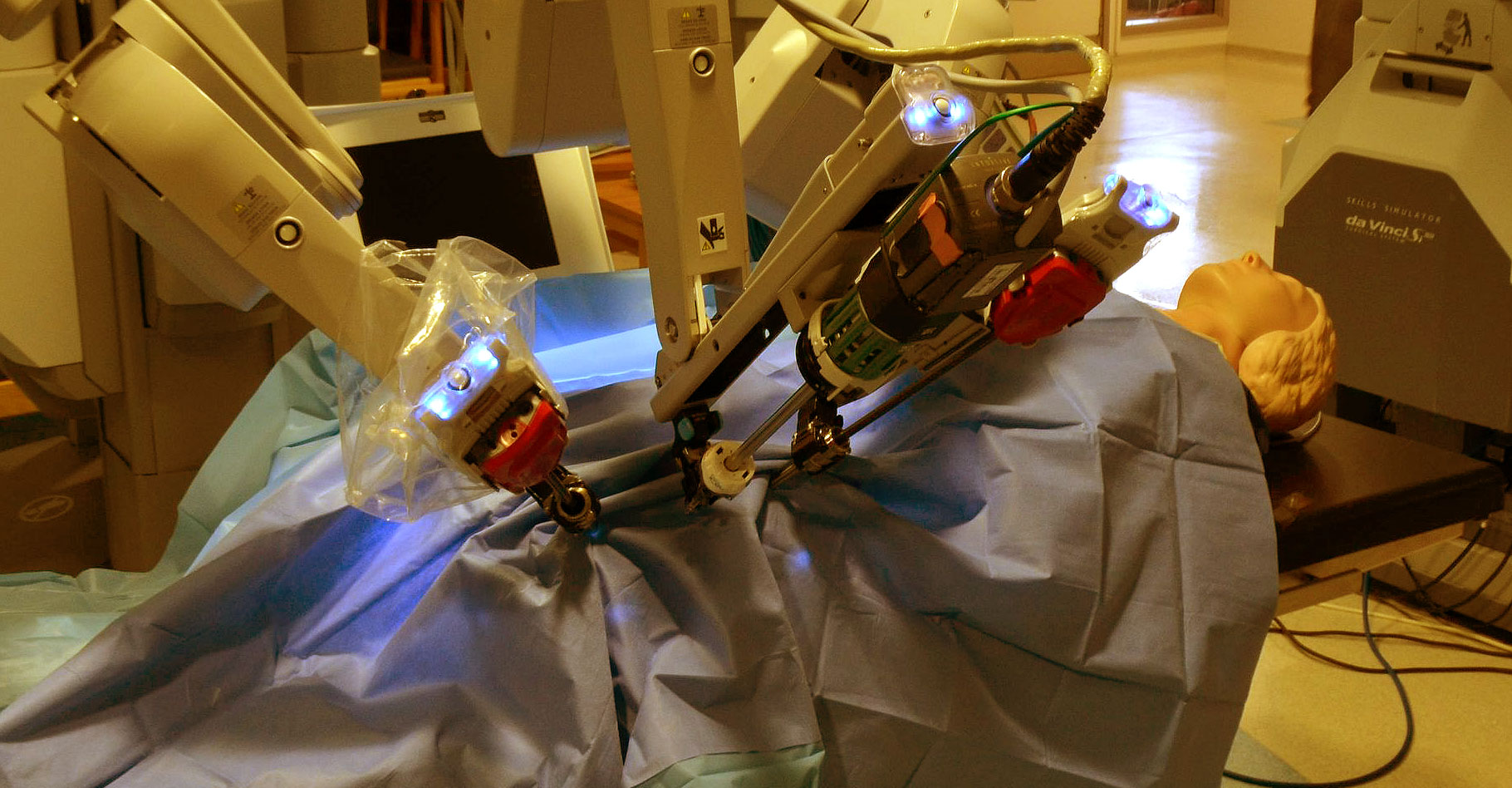
Robot chirurgical Vinci. © Cmglee - CC BY-SA 3.0
La robotiquerobotique permet aujourd'hui de remplacer l'Homme dans des milieux hostiles (figure 1), d'améliorer les capacités dans le domaine de la santé (figure 2), et d'envisager un quotidien facilité par les robots (figure 3).

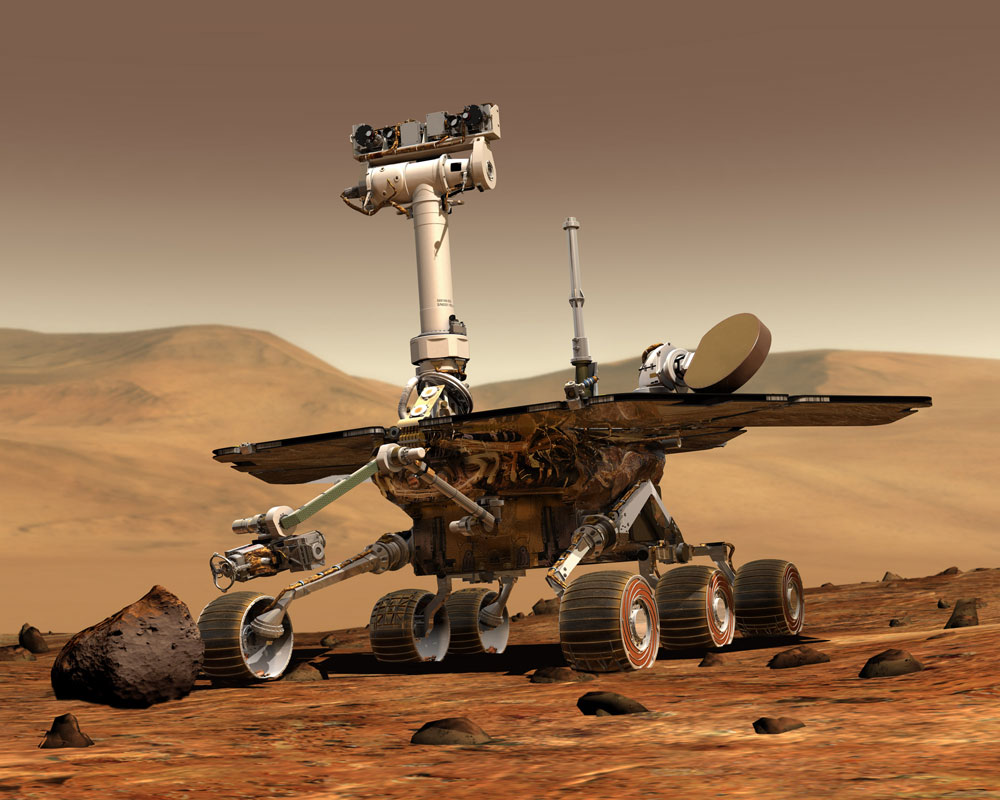
Figure 1. Vue de synthèse du robot Spirit de la Nasa dédié à l'exploration martienne. © Courtesy of Nasa/JPL-Caltech

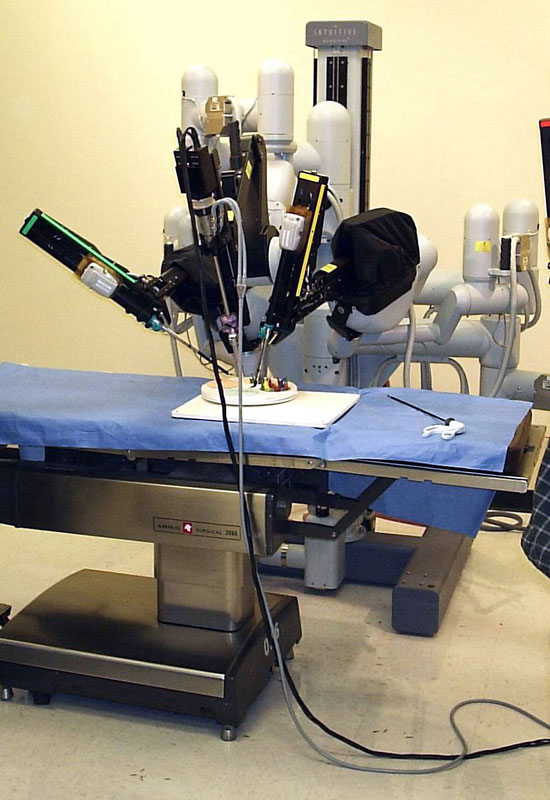
Figure 2. Le robot d'intervention chirurgicale Da Vinci, fabriqué par Intuitive Surgical. © Wikimedia Commons


Figure 3. Le robot de service PR2, fabriqué par la société Willow Garage. © Courtesy of Willow Garage
Le dossier de Eiichi YoshidaEiichi Yoshida sur le robot HRP2 propose une vision plus complète de la problématique de la commande des robots humanoïdesrobots humanoïdes.
Au delà de l'aspect robotique du problème, répondre à ces questions revient à mieux comprendre l'être humain et le vivant en général et ce sont alors des questions encore plus fondamentales qui sont soulevées.
Le dossier de Mehdi KhamassiMehdi Khamassi sur le rat artificiel Psikharpax donne un aperçu de ce domaine à la frontière entre robotique et sciences du vivant.
Notes bibliographiques
[1] J. Salini, V. Padois, and P. Bidaud. Synthesis of complex humanoid whole- body behavior: a focus on sequencing and tasks transitions. In To appear in the IEEEIEEE International Conference on Robotics and Automation, Shanghai, China, May 2011.
[2] Salaun, C. and Padois, V. and Sigaud, O. Learning Forward Models for the Operational Space Control of Redundant Robots. From Motor Learning to Interaction Learning in Robots, Springer-Verlag, publisher. Vol 264 Pages 169--192. 2010.



. Ce bras, clairement visible à droite de l'image est installé sur le segment russe de la Station spatiale. © Nasa")

 robot anthropoïde, conçu au Japon par l'AIST, au milieu de danseuses humaines. Pour l'instant, il est facile de faire la différence... © AIST/YouTube")
 robot anthropoïde, conçu au Japon par l'AIST, au milieu de danseuses humaines. Pour l'instant, il est facile de faire la différence... © AIST/YouTube")
 du 24 au 26 octobre 2017. © Rémy Decourt")


. Les missions seront également différentes. Si celles d’Apollo se limitaient à la Lune, ce véhicule est conçu pour voyager au-delà de la Lune (astéroïdes, Mars, point de Lagrange). © Esa, D. Ducros")

