







au sommaire
Au delà de ces aspects matériels, qui sont nécessaires mais pas suffisants pour faire face à la complexité des défis posés, les aspects logicielslogiciels sont un élément essentiel.

Asimo crée par Honda. © Catwalker - Shutterstock

iCub, le robot humanoïde. © RobotCub project
Le contrôle de robots est souvent présenté comme un problème à deux niveaux :
- un niveau « haut » associé aux aspects de raisonnement ou encore d'intelligence artificielleintelligence artificielle ;
- un niveau « bas » associé aux aspects d'exécution et plus précisément aux problèmes de commande des actionneurs.
Cette distinction bien que conceptuellement alléchante ne permet pas de rendre compte du niveau d'intricationintrication élevé entre les aspects de raisonnement et d'exécution et la résolutionrésolution des problèmes complexes est de plus en plus envisagée comme l'échafaudageéchafaudage de comportements simples dont l'assemblage peut mener à la réalisation de comportements plus complexes.
![Combinaisons et enchaînement de comportements simples pour la réalisation d'une tâche complexe par un robot iCub simulé [1]. © Courtesy of Vincent Padois](https://cdn.futura-sciences.com/cdn-cgi/image/width=1920,quality=60,format=auto/sources/images/dossier/rte/7598_08.jpg "Combinaisons et enchaînement de comportements simples pour la réalisation d'une tâche complexe par un robot iCub simulé [1]. © Courtesy of Vincent Padois")
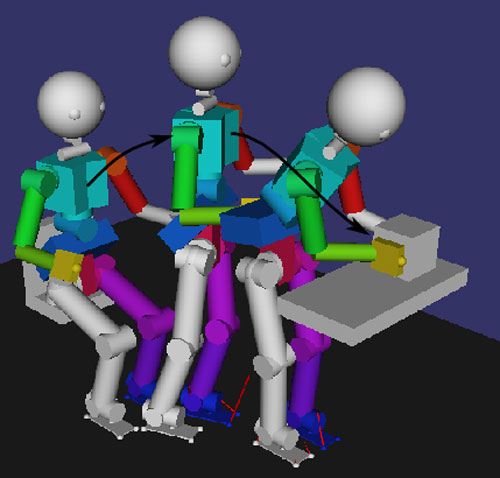
Combinaisons et enchaînement de comportements simples pour la réalisation d'une tâche complexe par un robot iCub simulé [1]. © Courtesy of Vincent Padois
Adaptabilité et apprentissage artificiel
Outre ces paradigmes de contrôle, l'adaptabilité est l'élément clé. Cette adaptabilité est en l'occurrence fortement liée à la capacité du système à réagir à des phénomènes non prévus. Elle se traduit par la capacité du robotrobot (plus précisément des algorithmes qui régissent son comportement) à intégrer de nouvelles informations par apprentissage artificiel. Par exemple, le contrôle d'un robot nécessite la connaissance de son modèle dynamique, autrement dit le modèle qui lie les accélérations qu'il peut produire aux forces qu'il subit. Ces efforts sont majoritairement issus des phénomènes physiques bien connus (gravité, inertie) et bien sûr des actionneurs qui permettent un contrôle actif du robot. Ceci étant dit, d'autres phénomènes physiques existent qui sont moins simples à modéliser du fait de leur non stationnarité (c'est-à-dire qu'ils sont fonction du temps). Ce sont les phénomènes de frottement mais aussi de jeu dont l'intensité varie notamment avec l'usure du robot. Ainsi, le contrôle précis d'un robot passe par la capacité à faire évoluer les modèles qui rendent compte de son comportement physique notamment en « apprenant » ces phénomènes de manière incrémentale.
Apprentissage incrémental

Le robot iCub en interaction avec des objets inconnus à priori. © Courtesy of the RobotCub project
Si l'adaptation incrémentale du modèle du robot peut s'avérer nécessaire, ce besoin d'apprentissage est encore plus flagrant lorsqu'un robot est amené à interagir avec des objets pas nécessairement connus à priori (image ci-dessus).
On peut alors discerner plusieurs problèmes d'apprentissage
Le premier est lié à la capacité à discerner ce qui est un objet de ce qui n'en est pas un et éventuellement à classifier cet objet en fonction d'un certain nombre de critères qui ne sont eux-mêmes pas nécessairement connus à priori. Ensuite, c'est le type d'interaction qu'il est possible d'avoir avec cet objet qu'il faut apprendre et là encore, ces interactions potentielles sont souvent à découvrir (« on peut faire rouler un objet cylindrique », « on ne peut pas faire bouger un murmur », ...)). On peut bien sûr imaginer lister toutes les interactions possibles avec les tous les objets ou classes d'objets possibles mais on se rend bien compte que ce genre d'approche est peu adaptatif (que faire quand on rencontre un nouveau type d'objet, oublié dans la liste ?) et que l'apprentissage incrémental est une voie, certes complexe, mais offrant des possibilités beaucoup plus larges.

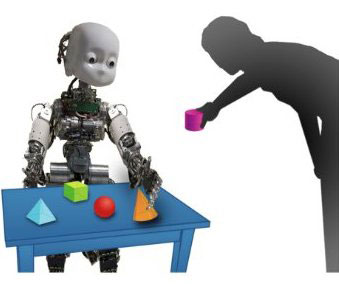
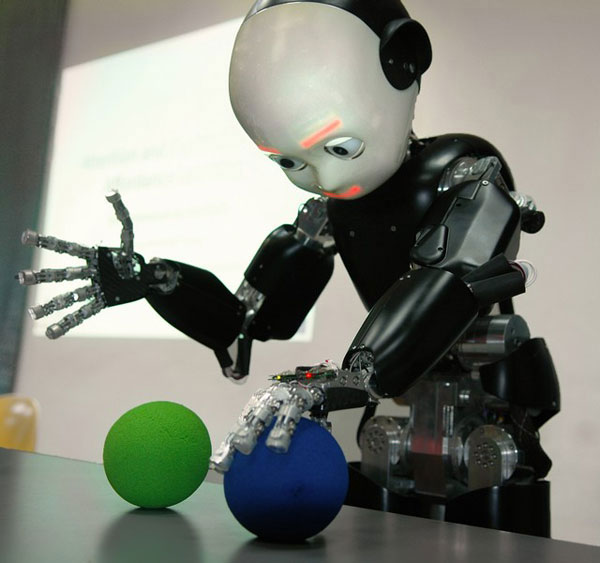
L'interaction sociale au cœur de l'apprentissage. © Courtesy of the MACSi project
La complexité de cette voie tient notamment au fait qu'elle nécessite une phase d'exploration du monde qui doit être intiment couplée avec une phase d'utilisation des connaissances déjà acquises. Une telle exploration ne peut pas être aléatoire et peut par exemple être guidée par les interactions avec les humains (par exemple si un humain agite un objet dans le champ visuelchamp visuel du robot, ils'agit probablement d'un objet d'intérêt, (image ci-dessus).






 de Pacific Rim : Uprising sont des robots géants. Deux pilotes reliés par télépathie les contrôlent par la pensée. © Universal Pictures International France")




, responsables de quelque 40 000 décès en France. © Ponchita, Adobe Stock")




")


