







au sommaire
Au-delà de ces aspects matériels, iCub a vraiment été pensé pour fournir un outil commun à la communauté scientifique de la robotiquerobotique développementale et fournir ainsi un démonstrateurdémonstrateur des théories développées, notamment celle liées à l'apprentissage.

Robot iCub. © MikeDotta - Shutterstock
C'est notamment autour de cette plateforme et du projet ANR MACSi (2011-2014), que trois équipes de recherche françaises contribuent à la mise aux développements théoriques de techniques d'apprentissage pour des robotsrobots en interaction sociale avec des êtres humains. Ces équipes sont celles de l'Institut des systèmes intelligents et de robotique de l'Université Pierre et Marie CurieMarie Curie à Paris (OlivierOlivier Sigaud, Mehdi KhamassiMehdi Khamassi et Vincent PadoisVincent Padois), du groupe de recherche Flowers de l'INRIA Sud-Ouest (Pierre-Yves OudeyerPierre-Yves Oudeyer) et du groupe de Robotique Cognitive de l'ENSTA (David Filliat). L'implantation logicielle des développements se fait en collaboration avec la société Gostai (Jean-Christophe Baillie).
iCub et le projet ANR MACSi
Ce projet qui débute vise notamment à répondre aux questions suivantes :
- Comment un robot peut-il apprendre des représentations perceptuelles efficaces de son propre corps et d'objets externes sur la base de donnéesbase de données perceptives peu structurées ?
- Comment un robot peut-il apprendre des représentations motrices et les utiliser pour construire des capacités basiques d'atteinte et de manipulation d'objets pour lesquels les modes d'interaction sont inconnus à priori ?
- Comment guider ces apprentissages étant donnés la complexité du robot et l'environnement inconnu et changeant qui l'entoure ?
- Comment des mécanismes permettant de construire incrémentalement les représentations/abstractions nécessaires à l'apprentissage de capacités de manipulation d'objets à priori inconnus peuvent ils être intégrés dans une même architecture robotique sans pour autant être spécifiques et ce afin de pouvoir les réutiliser pour des robots et des contextes différents ?
![Utilisation de modèles appris pour la réalisation de tâches par le robot humanoïde iCub : dessin d'un cercle sur un tableau blanc, pointage et suivi de cible [2]. © Courtesy of Vincent Padois](https://cdn.futura-sciences.com/cdn-cgi/image/width=1920,quality=60,format=auto/sources/images/dossier/rte/7599_013.jpg "Utilisation de modèles appris pour la réalisation de tâches par le robot humanoïde iCub : dessin d'un cercle sur un tableau blanc, pointage et suivi de cible [2]. © Courtesy of Vincent Padois")
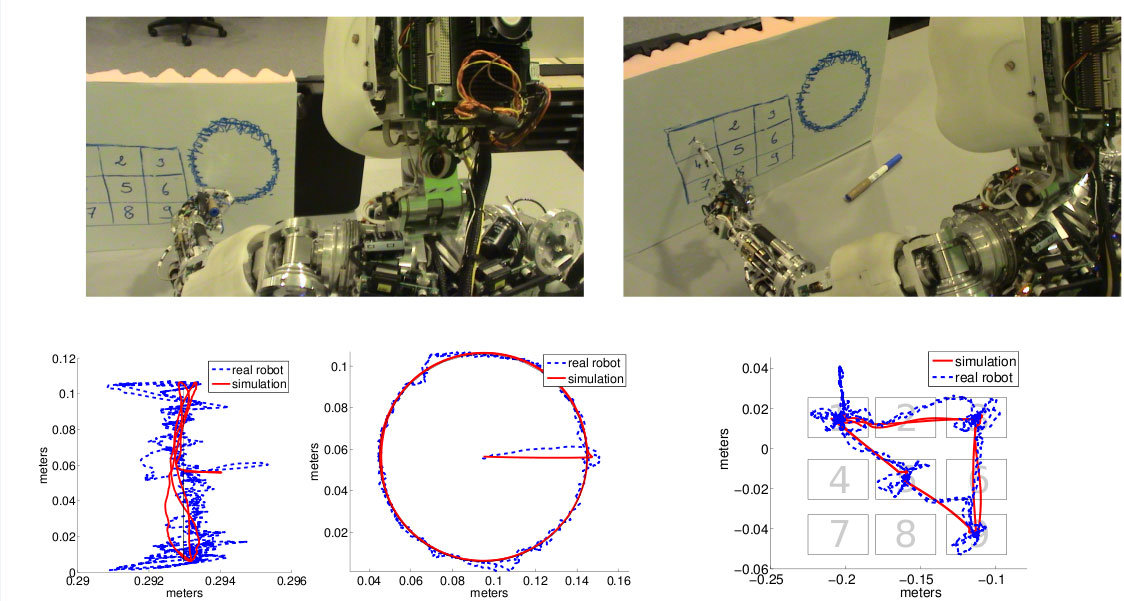
Utilisation de modèles appris pour la réalisation de tâches par le robot humanoïde iCub : dessin d'un cercle sur un tableau blanc, pointage et suivi de cible [2]. © Courtesy of Vincent Padois
Les premiers travaux notamment réalisés à l'Isir dans le cadre du travail de thèse de Camille Salaün (et avec la collaboration de Guillaume Sicard et de Charles Clercq) ont permis de démontrer la faisabilité d'approches de commande basées « modèles » et pour lesquelles ces modèles sont appris incrémentalement au travers d'explorations (voir l'image ci-dessous).
![Utilisation de modèles appris pour la réalisation de tâches par le robot humanoïde iCub : dessin d'un cercle sur un tableau blanc, pointage et suivi de cible [2]. © Courtesy of Vincent Padois](https://cdn.futura-sciences.com/cdn-cgi/image/width=1920,quality=60,format=auto/sources/images/dossier/rte/7599_013b.jpg "Utilisation de modèles appris pour la réalisation de tâches par le robot humanoïde iCub : dessin d'un cercle sur un tableau blanc, pointage et suivi de cible [2]. © Courtesy of Vincent Padois")
Utilisation de modèles appris pour la réalisation de tâches par le robot humanoïde iCub : dessin d'un cercle sur un tableau blanc, pointage et suivi de cible [2]. © Courtesy of Vincent Padois















