

Aussi léger qu'un insecte, ce mini-robot rejoint la catégorie des plus petits robots autonomes jamais inventés. Des scientifiques américains ont contourné le problème de la source d'alimentation. Selon eux, ce prototype peut ouvrir la voie vers une nouvelle génération de micro-robots, capables de se mouvoir aussi bien sur terre que dans l'eau ou dans les airs.
au sommaire
Une équipe de l'université de Californie du Sud a mis au point un robot de 88 milligrammes qui avance, grimpe et porteporte des charges grâce à des muscles artificiels, après avoir résolu un problème qui a longtemps tenu les ingénieurs en échec : la source d'énergieénergie sur de si petits robots. Ils ont baptisé leur robot RoBeetle, ou robot scarabée. Il ne mesure que 15 millimètres de longueur, ce qui fait du scarabée robotique « l'un des robots autonomes les plus légers et petits jamais créés », dit à l'AFP son inventeur, Xiufeng Yang.
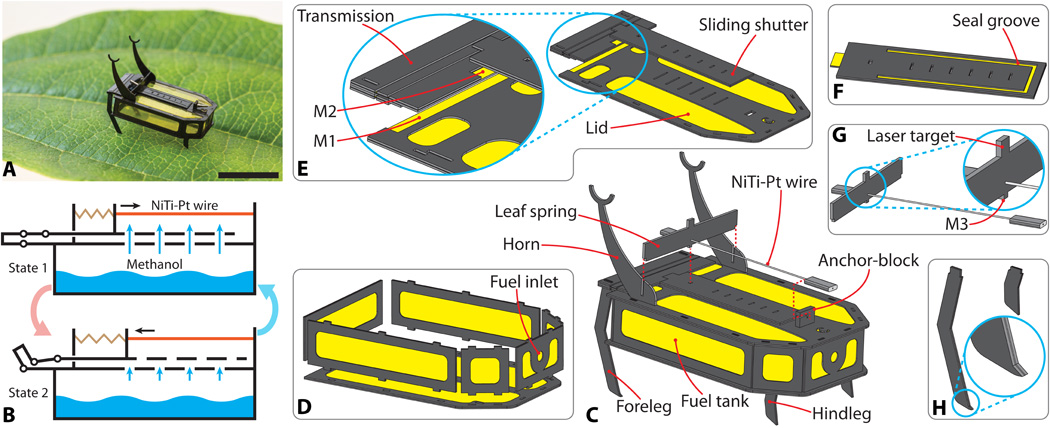
 Photographie d'un prototype RoBeetle. (B) Schéma de principe du mécanisme d'actionnement de RoBeetle. (C) Vue éclatée de l'assemblage robotique. (D) Vue éclatée du sous-ensemble du réservoir de carburant. (E) Vue éclatée du couvercle du réservoir, de la transmission et du volet coulissant. (F) Côté inférieur du volet coulissant. (G) Fil composite NiTi-Pt et ressort à lames. (H) Membres antérieurs et postérieurs avec des griffes bioinspirées orientées vers l'arrière. © Yang et AL ., Science Robotics 2020")
Autonome et musclé artificiellement
« Nous voulions créer un robot dont le poids et la taille seraient comparables à ceux de vrais insectes », ajoute le chercheur, premier auteur de l'article décrivant l'invention mercredi dans la revue Science Robotics. La plupart des robots ont besoin de moteurs électriques pour avancer, et donc de batteries. Mais les batteries les plus petites existantes pèsent entre 10 et 20 fois plus que le scarabée de 50 milligrammes que l'équipe a pris comme animal de référence.
L'équipe de Xiufeng Yang a donc mis au point un système musculaire artificiel fondé sur un carburant liquideliquide, en l'occurrence du méthanol, capable de fournir dix fois plus d'énergie qu'une batterie de massemasse identique.
Les muscles sont composés d'un alliagealliage de fils en nickelnickel et titanetitane (Nitinol) qui se contractent en longueur lorsqu'ils sont chauffés (contrairement à la plupart des métauxmétaux, qui s'allongent). La chaleurchaleur était causée par le contact entre la vapeur de méthanol émanant du réservoir et un catalyseurcatalyseur gainant les fils (une poudre de platineplatine). La vapeur chauffait les fils, les « muscles » se contractaient, puis des microvalves stoppaient automatiquement la combustioncombustion, et les muscles s'étendaient de nouveau, déclenchant la réouverture des valves et un nouveau cycle de contraction-extension des muscles, jusqu'à épuisement du réservoir.

RoBeetle avance, grimpe et porte des charges grâce à ses muscles artificiels. © Yang et Al ., Science Robotics 2020
Le système parvenait ainsi à faire avancer les pattes avant du scarabée sur des surfaces planes, comme du verre, ou rugueuses, comme le dessus d'un matelas, jusqu'à deux heures de suite -- avec jusqu'à 2,6 fois son poids sur le dosdos. Par comparaison, « le plus petit robot à quatre pattes à batterie pèse un gramme et opère environ 12 minutes », dit Xiufeng Yang.
Quelles applications pour ce mini-robot autonome ?
À quoi peuvent servir ces mini-robots ? Des inspections d'infrastructures, des missions de sauvetage après une catastrophe naturelle, voire des pollinisations artificielles ou des programmes de surveillance environnementale.
Mais, dans l'immédiat, l'absence d'électronique embarquée, et le fait qu'il ne sache qu'avancer en continu, limitent son utilité, pointent les roboticiens Ryan Truby et Shuguang Li, respectivement du MIT et d'Harvard, dans un commentaire publié par la même revue.

par Futura avec l'AFP-Relaxnews
le 24 août 2020




")









. Cliquez sur l’image pour voir l’animation. © Hans Hartung, Wikipédia, by sa 2.0")
, responsables de quelque 40 000 décès en France. © Ponchita, Adobe Stock")




")


