

Dans l’usine turinoise de Thales Alenia Space, on prépare le rover de la mission ExoMars 2018. Encore loin de la construction, les ingénieurs finalisent l’architecture de l’engin avant les phases de développement et de définition prévues en avril 2011.
au sommaire
ExoMars est une mission conjointe entre l’Esa et la Nasa qui se fera en deux étapes, en 2018 et 2016. La mission de 2016, réalisée sous la maîtrise d'œuvre de l'Esa, consiste en un orbiteur et un atterrisseur de 600 kgkg lancés par une fuséefusée Atlas-5. Quant à la mission de 2018, elle sera bien plus ambitieuse et dirigée par la Nasa. Les deux partenaires prévoient de déposer sur la surface de Mars deux rovers, l'un américain et l'autre européen (ExoMarsExoMars), à l'aide du même atterrisseur.
Le rover européen de 2018 sondera le sol à l'aide d'un radar et réalisera des forages pour prélever des échantillons jusqu'à 2 mètres de profondeur. Protégés de l'oxydation de surface et des rayonnements spatiaux et solaires, ces échantillons seront analysés pour chercher des traces de molécules organiques et, pourquoi pas, de vie. Il sera doté d'une très grande autonomieautonomie et capable de franchir des obstacles de 25 centimètres de haut, des pentes de quelque 26 degrés et parcourir jusqu'à 100 mètres par jour. Une distance qui ne sera atteinte qu'en de très rares occasions afin de ménager la mécanique et l'électronique de bord.
Pour s'assurer que ces performances seront réellement atteintes lorsqu'il gambadera sur Mars, Thales Alenia Space, le maître-d'œuvre du programme, et Altec (co-entreprise entre Thales Alenia Space et l'Agence spatiale italienne) testent une maquette représentative du squelette de l'engin sur un terrain simulant une surface martienne, le logiciellogiciel de navigation et l'architecture du système de locomotion.

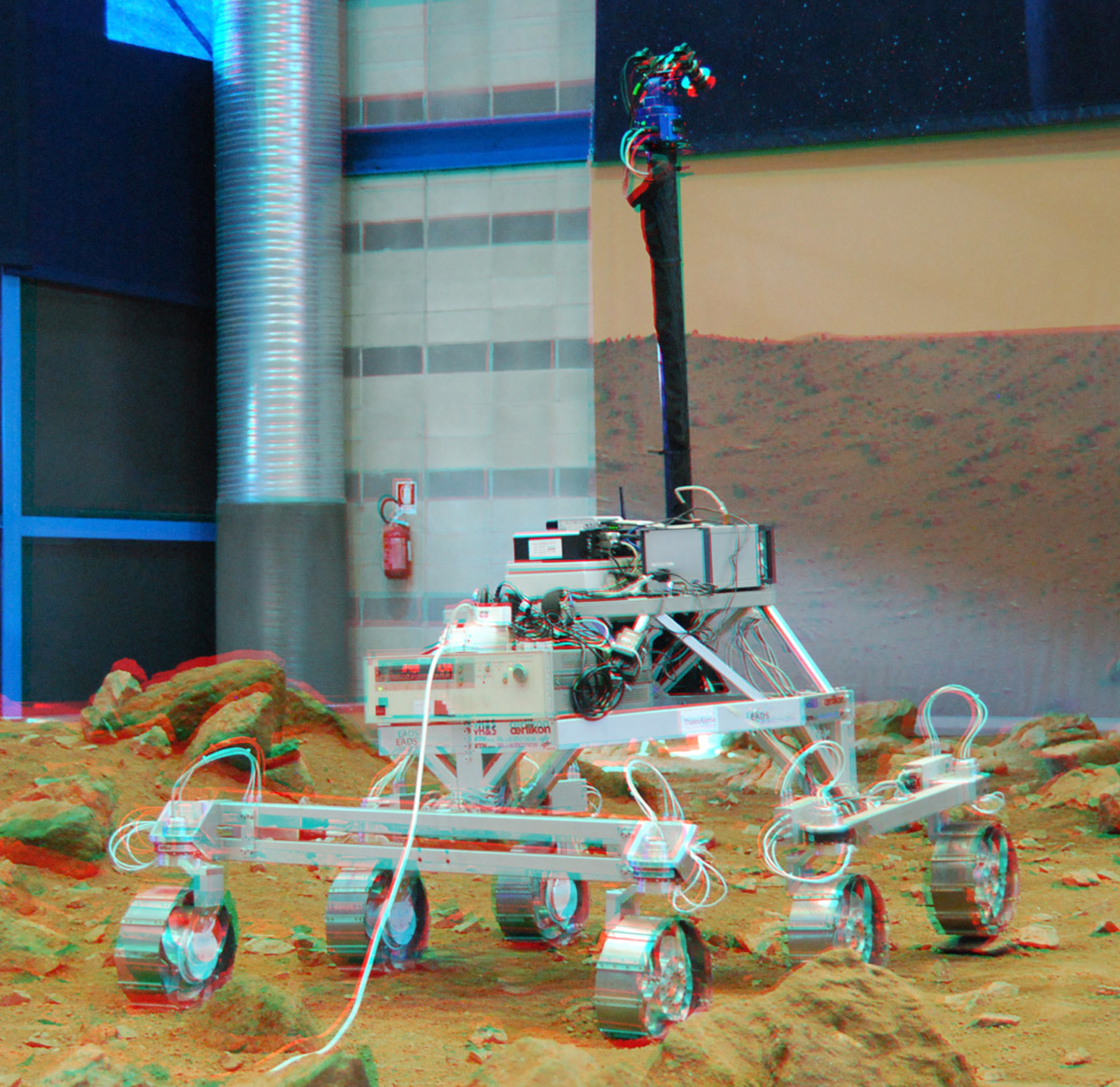
Pour regarder cette image d'ExoMars en relief, chaussez des lunettes anaglyphes. © Remy Decourt
La maquette n'est pas à l'échelle mais les charges sur la locomotion de l'engin sont représentatives de celles que l'on peut observer sur Mars que ce soit pour le couple moteur ou les interactions roues-sol. Doté de six roues montées par paires, qui peuvent être indépendamment directrices et motrices, le tout suspendu sur trois bogies articulés et également indépendants, l'engin pourra également se déplacer en crabe. Cela facilitera grandement l'évitement de certains obstacles qui seraient trop hauts à franchir en ligne droite ou nécessiteraient de tracer des courbes trop amples pour le contourner. Altec s'assure que les capacités de déplacement et de franchissement sont en ligne avec le cahier des charges de l'Agence spatiale européenne.
Autre défi, le logiciel de navigation qui doit donner au rover la capacité de tracer de manière autonome une route sûre et optimale vers une cible prédéfinie. Ce logiciel fonctionnera à partir d'images stéréo acquises par deux caméras installées sur un mat d'environ deux mètres, qui créeront des cartes numériquesnumériques d'élévations, d'obstacles et d'évitement. L'idée est de créer des algorithmes de navigation autonome qui permettront au rover, à l'aide de ces cartes, de déterminer si le terrain qui l'entoure est montagneux, en pente ou pas, de façon à tracer une route vers sa cible, sans que l'on ait besoin de le guider depuis la Terre. Une fois sur zone, il fera un état des lieux et enverra les données sur Terre pour que les scientifiques lui disent quoi faire.



 et ExoMars 2018, la Nasa et l’Esa ouvrent la voie à une nouvelle étape de l’exploration avec des missions plus longues pour l'américaine et plus audacieuses dans leur façon de travailler. Avec l'arrivée de nouvelles idées, la durée de vie et les capacités de franchissement sont deux contraintes qui vont s'estomper progressivement. © Nasa")




















