

au sommaire
Dans la gorge, la minuscule pince descend doucement. Elle ressemble à une petite mâchoire, fixée à l'extrémité d'une sorte de serpent métallique, mais dont les segments articulés évoquent plutôt l'arthropodearthropode que le reptilereptile. L'engin ondule pour suivre le conduit naturel sans le toucher, négociant même des courbes en S. Aux commandes, à l'aide de deux grosses poignées, le chirurgien guide le serpent avec précision en regardant un écran.
Cet engin existe bel et bien. Il est en expérimentation à l'université Johns Hopkins, où des roboticiens et des chirurgiens travaillent ensemble depuis plusieurs années pour concevoir toutes sortes d'assistants robotisés. Fabriqué en matériaux non magnétiques, ce serpent-robot ne risque pas d'interférer avec des appareils d'imagerie magnétique. C'est en effet un ensemble cohérent d'instruments divers que cherchent à mettre au point les équipes de l'université américaine.

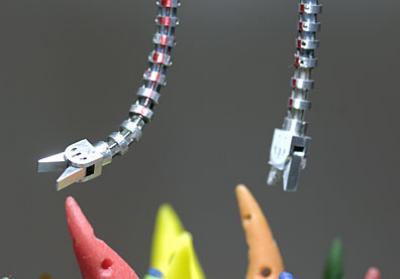
Avec ses six degrés de liberté, ce serpent articulé, commandé par un chirurgien par l'intermédiaire d'un ordinateur, peut suivre de véritables méandres dans le corps humain et porter différents instruments. Crédit : Will Kirk / JHU
L'ordinateur, assistant en chef
D'ailleurs, les ingénieurs et les médecins ne manquent pas d'idées pour développer leur bestiaire de robots assistants. L'une des équipes a fabriqué un système anti-tremblement destiné aux tâches exigeant une grande précision. La main manipule un instrument, par exemple une seringue, maintenu par une articulationarticulation reposant sur un socle. L'instrument est en fait piloté par un ordinateur, qui analyse les mouvementsmouvements de la main sans tenir compte des petits écarts par rapport à la trajectoire moyenne. Avec ce dispositif, un des membres de l'équipe a pu réaliser une injection dans un des minuscules vaisseaux sanguins d'un embryonembryon de poulet. Ce modèle n'est pas sans intérêt car il ressemble beaucoup à l'irrigationirrigation de la rétinerétine, extrêmement délicate.


Pour introduire une aiguille dans un vaisseau fin comme un cheveu, la précision de la main humaine, même celle du meilleur chirurgien, ne suffit plus. Ce porte-instruments stabilise totalement le mouvement grâce, là aussi, à l'intermédiation d'un ordinateur. Crédit : Will Kirk / JHU
Allison Okamura, elle, veut donner de la sensibilité aux outils robotisés pour permettre la manipulation de vaisseaux fragiles. Pour manipuler son prototype de mini-pince, le chirurgien glisse les doigts dans une commande, un peu comme dans des ciseaux. Lorsqu'il ferme l'instrument sur un objet, la commande se durcit proportionnellement à la force appliquée sur la pince. Il ne s'agit donc pas d'un sens du toucher mais le praticien peut au moins sentir la résistancerésistance du tissu.
Au sein de cette instrumentation, l'informatique joue un rôle central. Elle permet déjà de mettre à la disposition du chirurgien toutes les informations possibles sur le patient. Elle peut aussi enregistrer toutes les actions commandées ou contrôlées par l'ordinateur. Devenue l'équivalent de la boîte noire dans un avion, l'ordinateur permet ensuite d'analyser tout ce qui s'est passé pour comprendre une erreur, préparer une intervention ultérieure ou aider à améliorer le dispositif.
















, responsables de quelque 40 000 décès en France. © Ponchita, Adobe Stock")




")


