
au sommaire


Le robot Mako, comanipulateur parallèle pour la chirurgie orthopédique. © makosurgical.com
- Découvrir la totalité de notre dossier Robots chirurgiens : la comanipulation, avenir de la chirurgie ?
Les robots chirurgiens d'aujourd'hui : le mode automatique
Aujourd'hui, la plupart des dispositifs robotiques utilisés en routine clinique pour la pratique chirurgicale fonctionnent selon l'un des deux modes de commande : automatique et téléopérationtéléopération.



Un robot pour la chirurgie. © SRI International
Chirurgie orthopédique : le robot Mako
Les fonctions que peuvent offrir les systèmes de comanipulation sont très nombreuses et leur utilité pour l'assistance au geste chirurgical prend des formes très variées. Le robot chirurgien Mako, lui, est spécialisé dans la chirurgiechirurgie orthopédique.



Le robot Mako, comanipulateur parallèle pour la chirurgie orthopédique. © makosurgical.com
Comanipulation en microchirurgie
Les applicationsapplications de la comanipulation ne sont pas limitées à la mise en œuvre de guides pour l'usinage en orthopédieorthopédie. Elles sont utiles également en microchirurgie.

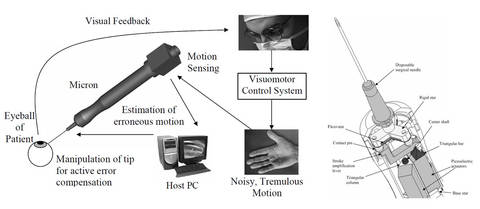

Schéma de principe du système Micron pour l’assistance à la microchirurgie. On exploite ici le principe de comanipulation série. © WeiTech Ang










 sous la forme d'une IA futuriste inspirée par le courant cyberpunk. © DR")





, responsables de quelque 40 000 décès en France. © Ponchita, Adobe Stock")




")


