 et ses performances (500 grammes soulevés) sont loin de la belle réussite des proboscidiens… © Festo")
 et ses performances (500 grammes soulevés) sont loin de la belle réussite des proboscidiens… © Festo")
au sommaire
Pour manipuler des objets de toutes sortes, le bras-robot a trouvé d'innombrables applicationsapplications, jusqu'au Canadarm2 installé sur la Station spatiale internationaleStation spatiale internationale. En général, le principe est fidèle aux habitudes des mécaniciens : des bras réunis par des articulationsarticulations. Si l'on parle biomécanique, le résultat est voisin de ce que la nature a mis au point chez les VertébrésVertébrés (avec leurs os internes aux membres) et chez les ArthropodesArthropodes (avec leur squelette externesquelette externe).
Ce concept a un défaut : le nombre d'articulations nécessaire. Pour chaque axe de mouvementmouvement, que l'on appelle un degré de liberté, il faut ajouter de la mécanique. La complexité et la fragilité de nos poignets et de nos épaules témoignent de la difficulté de réalisation... Sur un bras-robot, le poids augmente vite avec le nombre de degrés de liberté. Le Canadarm2, par exemple, a une massemasse de 1,8 tonne.

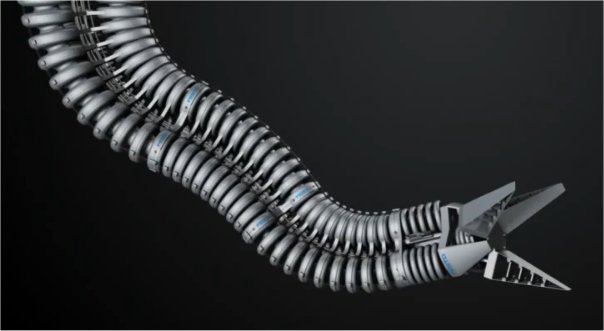
Le Bionic Handling Assistant. © Festo
Pourtant, un Vertébré bénéficie d'une prouesse mécanique sans équivalent : un bras sans os, flexible et préhensilepréhensile. La trompe de l'éléphant, avec ses cent mille muscles, permet de saisir et de transporter des charges lourdes (près de 300 kilogrammeskilogrammes dit-on) sans aucune articulation.
Une société allemande, Festo, spécialiste de l'automatisme, s'en est inspirée pour réaliser un bras-robot d'un nouveau genre, baptisé Bionic Handling Assistant. Le résultat ferait sans doute sourire un éléphant mais l'innovation est réelle.
Une explication (muette mais avec des légendes en anglais) du Bionic Handling Assistant. La structure élémentaire (fabriquée par une technique d’impression 3D ou stéréolithographie) est constituée de trois chambres à air. L’injection ou l’aspiration d’air provoque un mouvement ou l’extension. Les mouvements du poignet (portant la main, ou gripper) sont obtenus de manière similaire. © Festo
500 grammes à bout de bras
Une série de petits boudins gonflables assurent les mouvements, commandés par de l'airair comprimé. Le bras peut s'allonger, se rétracter et se déformer. À l'extrémité, une main à trois doigts est articulée par un poignet lui aussi constitué de chambres à air comprimé. Festo a imaginé un autre principe, inspiré, lui, des nageoires de poissonspoissons. L'ossature du bras est ici constituée de trois fines fibres souples qui, sélectivement avancées ou reculées, produisent le mouvement (une vidéo en anglais présente les deux types de bras-robots de Festo)).
Le résultat semble prometteur. Pour un poids de 1,8 kilogramme, ce bras de 0,75 mètre soulève 500 grammes. L'utilisation d'air comprimé pour obtenir un mouvement n'est cependant pas une nouveauté. L'inconvénient de ce principe est le manque de précision par rapport aux systèmes mécaniques classiques. Dans le bras de Festo, des capteurscapteurs permettent semble-t-il un bon contrôle du mouvement puisqu'on voit la main saisir une pomme et même un œuf dans l'une des vidéos.
Aquajelly, la méduse-robot. Sans utilité réelle, cet engin nage comme son modèle biologique : en contractant symétriquement ses muscles. Il ne peut donc se déplacer que dans le plan vertical (sauf s’il y a du courant…). © Festo
Une autre particularité du bras est la méthode de fabrication des chambres, réalisées en polyamidepolyamide directement par ordinateur. La technique est celle de l'impression 3D, ou stéréolithographie, qui consiste à polymériser une résine couche par couche pour fabriquer un objet. Le procédé est censé réduire le coût de fabrication.
Festo semble aimer la bionique puisque l'entreprise a également conçu Aquajelly, un robot sous-marinsous-marin se déplaçant à la manière d'une méduseméduse...







")



 et son avatar en silicone (Medusoid, pour médusoïde). On remarque la structure radiaire du système musculaire de la méduse. À droite, cette structure reproduite à l'échelle micrométrique dans le médusoïde. © Kevin Kit Parker, Harvard University")




, responsables de quelque 40 000 décès en France. © Ponchita, Adobe Stock")




")


