
au sommaire
 est insérée (à gauche). C'est une pression d'air plus faible (Suction Chambers) qui attire le liquide vers la droite. Plus lourds, les globules rouges et les globules blancs s'arrêtent dans la première chambre (Plasma Extraction). Le plasma seul s’écoule jusqu’au détecteur de biomarqueurs (Biomarker Detection) où est réalisée l'analyse. Ce genre de dispositif nécessite le contrôle fin du mouvement de fluides à toute petite échelle, ce que l'on ne sait pas encore bien faire. © Ivan Dimov, UC Berkeley")
 est insérée (à gauche). C'est une pression d'air plus faible (Suction Chambers) qui attire le liquide vers la droite. Plus lourds, les globules rouges et les globules blancs s'arrêtent dans la première chambre (Plasma Extraction). Le plasma seul s’écoule jusqu’au détecteur de biomarqueurs (Biomarker Detection) où est réalisée l'analyse. Ce genre de dispositif nécessite le contrôle fin du mouvement de fluides à toute petite échelle, ce que l'on ne sait pas encore bien faire. © Ivan Dimov, UC Berkeley")
Un prototype de laboratoire sur puce, destiné à l'analyse du plasma sanguin, élaboré grâce à la microfluidique et ne nécessitant aucun circuit électronique. Une minime quantité de sang (Whole Blood) est insérée (à gauche). C'est une pression d'air plus faible (Suction Chambers) qui attire le liquide vers la droite. Plus lourds, les globules rouges et les globules blancs s'arrêtent dans la première chambre (Plasma Extraction). Le plasma seul s’écoule jusqu’au détecteur de biomarqueurs (Biomarker Detection) où est réalisée l'analyse. Ce genre de dispositif nécessite le contrôle fin du mouvement de fluides à toute petite échelle, ce que l'on ne sait pas encore bien faire. © Ivan Dimov, UC Berkeley
Pour réaliser des machines microscopiques, il ne suffit pas de miniaturiser ce que l'on sait faire à notre échelle. Car les lois de la physiquephysique, si elles ne changent pas (sauf si l'on descend dans le monde quantique, mais ceci est une autre histoire), se découvrent d'autres paramètres. En se déplaçant dans un liquideliquide, par exemple, la traînée, la viscosité ou la tension superficielle produisent des effets inconnus à notre échelle : les gerris (insectesinsectes hémiptèreshémiptères hétéroptères) marchent sur l'eau, mais des nageurs de moins d'un millimètre sembleraient englués comme dans du miel.
Les ingénieurs du microscopique doivent penser autrement. C'est ce que fait une équipe du Georgia Institute of Technology en posant les bases théoriques d'un minuscule robot nageur dont les dimensions seraient de l'ordre du micron (ou micromètremicromètre, millième de millimètre). Effectivement, il ne ressemble à rien de connu et ne pourrait pas exister à notre échelle. Cependant, promettent les simulations effectuées, avec ses petites dimensions, il fonctionnerait très bien et pourrait avoir de multiples applicationsapplications médicales. D'actives recherches sont menées actuellement pour imaginer ce genre de micro ou nanomachines. Les unes serviraient de transporteur de médicament ne délivrant leur produit actif qu'au niveau d'une tumeurtumeur ou de certaines cellules, comme les neurones. D'autres, fixées sur un support, canaliseraient des flux liquides de très petites tailles : c'est l'idée de la microfluidique, qui permettrait de réaliser un laboratoire à l'échelle d'une puce électronique (lab-on-a-chip, disent les anglophones).
 ferait plier la petite plaque enfichée à l'avant et agissant comme un gouvernail. Les traces vertes indiquent les mouvements du fluide environnant résultant de ces mouvements, calculés par le logiciel de simulation. De quoi faire avancer ce microrobot ou bien, s'il est solidaire d'un support, mettre en mouvement un liquide. © Alexander Alexeev")
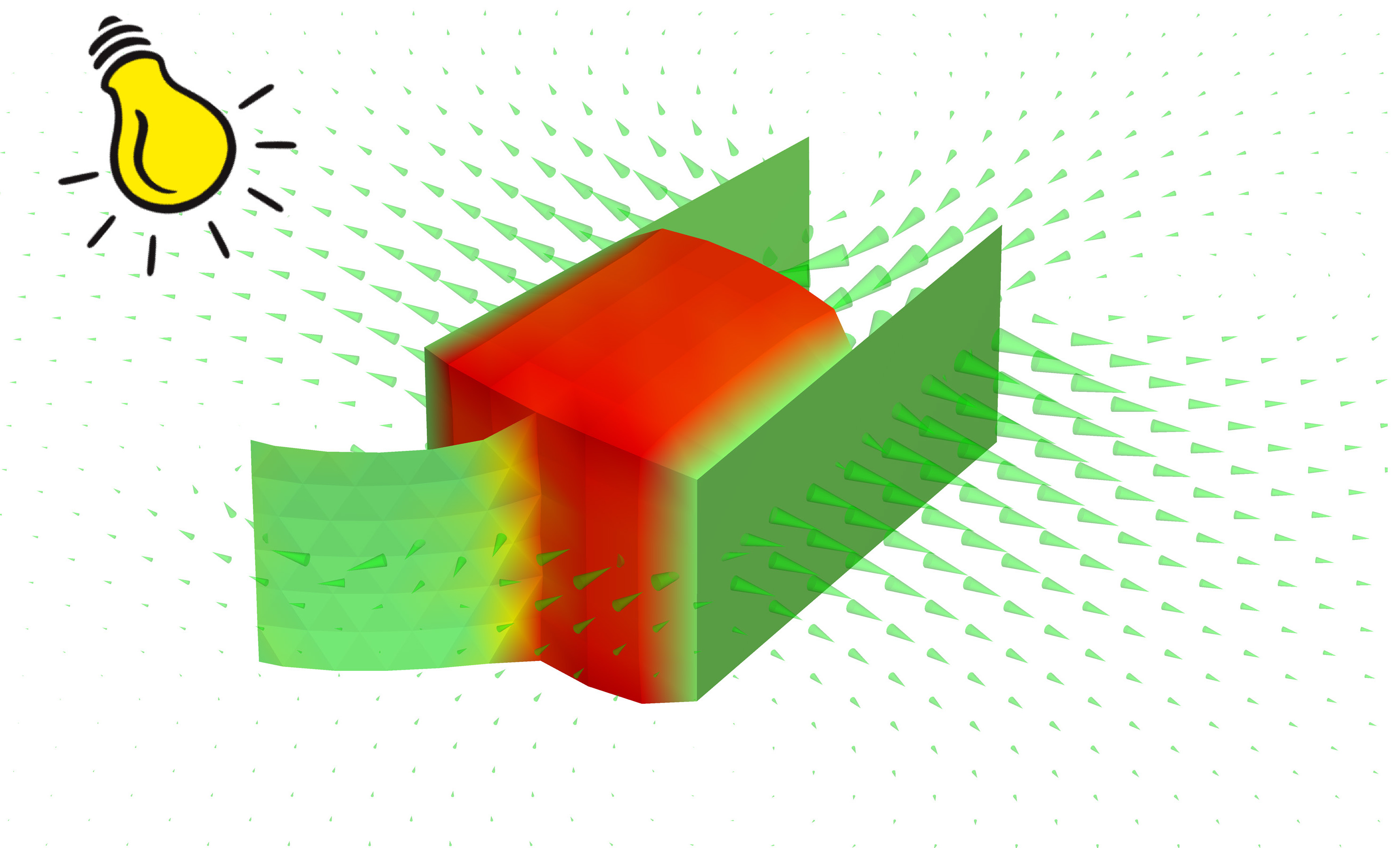
Une représentation très schématique de ce microrobot nageur. Un stimulus externe, et périodique, pourrait faire enfler et désenfler le cube rouge, provoquant la déformation des plaques latérales, lesquelles se tordraient cycliquement, à la manière de palmes. Un autre stimulus externe (ici la lumière) ferait plier la petite plaque enfichée à l'avant et agissant comme un gouvernail. Les traces vertes indiquent les mouvements du fluide environnant résultant de ces mouvements, calculés par le logiciel de simulation. De quoi faire avancer ce microrobot ou bien, s'il est solidaire d'un support, mettre en mouvement un liquide. © Alexander Alexeev
Un micronageur avec deux palmes et un gouvernail
Le corps de ce micronageur est un cube d'hydrogelhydrogel flanqué de deux plaques, une sur chaque flanc et dépassant vers l'arrière (défini par le sens de déplacement). Une troisième est plantée sur la face avant. L'énergieénergie vient de l'extérieur et le pilotage se fait à distance. Le corps du micronageur enfle ou désenfle sous l'effet d'un stimulus à trouver : réactions chimiquesréactions chimiques oscillantes, variations d'un champ électriquechamp électrique ou magnétique ou successions cycliques de changements de température. Ce mouvementmouvement plie les deux plaques latérales dans un sens, ou dans l'autre, et leurs parties libres oscilleraient alors comme des palmes. Voilà pour la poussée. La plaque avant, elle, serait choisie dans un matériaumatériau réagissant par exemple à la lumière et servirait de gouvernail. Un tel engin serait donc contrôlable à distance, soit pour avancer dans une direction donnée, soit pour mettre en mouvement le fluide dans lequel il baigne.
Encore fallait-il démontrer qu'il avancerait comme prévu. C'est ce qu'a vérifié l'équipe en mettant à contribution les lois de l'hydrodynamique, « pas simple à cette échelle », expliquent-ils. L'équipe espère que ce travail, publié dans la revue Soft Matter, servira de base à d'autres ingénieurs pour réaliser ce type de dispositif micrométrique.
« Nous voulions démontrer comment des robots aussi petits pourraient se déplacer en déterminant ce qui est important et ce qui serait nécessaire pour construire un système réel », résume Alexander Alexeev, de l'école d'ingénierie mécanique (George W. Woodruff School of Mechanical Engineering)) du Georgia Institute of Technology. Les « expérimentateurs », selon l'expression de ce chercheur, ne doivent donc pas se décourager : un robot de taille micrométrique peut nager, à condition de penser à des solutions complètement nouvelles...




 avec ses deux radicaux carbonés de part et d'autre, sur une surface de cuivre (atomes orange), pilotée par la pointe d'un microscope à effet tunnel (atomes gris). © Nature Nanotechnology-Sykes Laboratory")











, responsables de quelque 40 000 décès en France. © Ponchita, Adobe Stock")




")


