

Afin d’explorer les fonds marins, des chercheurs viennent de mettre au point un robot mou. Grâce à un système électronique distribué et des actionneurs souples, il a pu nager à une profondeur de plus de trois kilomètres.
au sommaire
Pour explorer les fonds marins, les robots et autres véhicules sous-marinssous-marins sont conçus avec des coques métalliques très épaisses pour résister à la pressionpression. Plus ils doivent descendre en profondeur, plus ces appareils deviennent encombrants. Une nouvelle approche, publiée dans la revue Nature, fait appel à la robotique molle pour créer un robot plus compact et plus résistant. Il est capable de se mouvoir de manière autonome à une profondeur de 3.224 mètres.
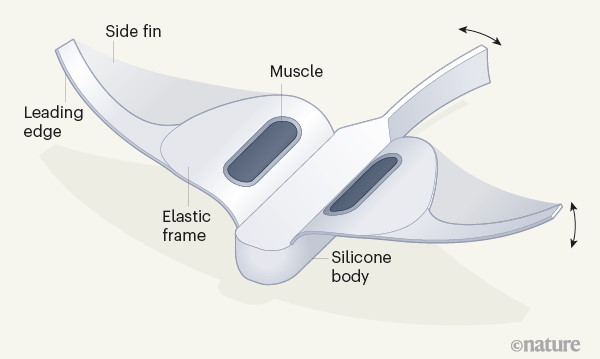
Les chercheurs se sont inspirés des liparidae, des poissonspoissons-limaces qui vivent dans les abysses, et qui n'ont pas de protection externe pour résister à la pression. Les éléments électroniques ont été séparés en les distribuant dans le corps du robot avant de les envelopper de siliconesilicone. Ceci réduit le stressstress causé par la pression au niveau des interfaces entre les composants.

Un corps mou avec des « muscles »
Le robot se déplace grâce à ses deux ailerons. Pour les « muscles », les chercheurs ont utilisé des élastomèresélastomères diélectriquesdiélectriques, un matériaumatériau mou qui se déforme lorsqu'il est soumis à un courant électriquecourant électrique. Un prototype de ce mécanisme a été testé avec succès à une profondeur de presque 11 kilomètres dans la fosse des Mariannes, tandis que le robot entier a pu nager sans support à plus de trois kilomètres de profondeur dans la mer de Chinemer de Chine méridionale.
Malgré le succès de cette première version du robot, les chercheurs doivent encore l'améliorer pour concurrencer les robots rigides. Avec une vitessevitesse de 5,19 centimètres par seconde (0,19 km/h), il est encore assez lent. De plus, il ne résiste pas aux courants et peut facilement être emporté. Toutefois, ce robot est bien moins cher à produire, et pourrait faciliter l'exploration des fonds marins une fois perfectionné.








 ont trouvé des morceaux de plastique dans les intestins d’un petit crustacé vivant dans la fosse des Mariannes. © Université de Newcastle, YouTube")


. Malheureusement, cette plante est aujourd’hui menacée par la pollution des rivages. © Nicolas Barraqué")




, responsables de quelque 40 000 décès en France. © Ponchita, Adobe Stock")




")


