
au sommaire


EBenne est un camion de 20 tonnes pilotable à distance, depuis un poste blindé contre les radiations. Il peut travailler de jour comme de nuit et mesure la radioactivité ambiante. © Intra
Autour de la centrale de Fukushima, des hommes prennent actuellement des risques graves pour réparer, refroidir, déblayer... La radioactivitéradioactivité est telle qu'ils ne peuvent travailler longtemps et plusieurs de ces « liquidateurs », comme étaient appelées ces équipes à Tchernobyl, ont été fortement irradiés. Alors, pourquoi pas des robots ? Il existe des engins spécialement conçus pour intervenir en milieu où la radioactivité est trop forte pour les humains.
En France, le GIE Intra a été créé en 1988 par Areva, le CEA et EDF pour concevoir et mettre en œuvre des engins capables de ce genre de prouesses. Le catalogue est maintenant riche d'une quinzaine de matériels, qui vont du robot téléguidé au poste de commande blindé, en passant par des camions ou des grues pilotables à distance. Aucun n'est un robot autonome capable de prendre des initiatives et les engins mobilesmobiles ne sont que des systèmes télécommandés munis de caméras.
Que pourraient-ils faire à Fukushima ? Ces robots ont bien failli partir pour le Japon mais les responsables de la centrale n'en ont pas voulu. Michel Chevallier, directeur d'Intra, nous explique comment ces robots sont conçus et à quoi ils peuvent servir. Leurs limites : ils sont - eux aussi - sensibles à la radioactivité et la télécommande pose problème à l'intérieur des bâtiments.
 : cet engin de plus 6 tonnes, télécommandé par radio, peut intervenir à l'extérieur pour mesurer la radioactivité, récupérer des débris, effectuer des prélèvements... © Intra")

Erase (Engin de reconnaissance Assistance Surveillance extérieure) : cet engin de plus 6 tonnes, télécommandé par radio, peut intervenir à l'extérieur pour mesurer la radioactivité, récupérer des débris, effectuer des prélèvements... © Intra
Futura-Sciences : Pour quels types de missions sont prévus les engins que vous proposez ? Et pourquoi n'ont-ils pas pris le chemin de Fukushima ?
Michel Chevallier : Les engins que nous proposons sont conçus pour des missions précises. À partir de ce cahier des charges, soit nous adaptons des matériels qui existent déjà, soit nous concevons des engins tout à fait nouveaux. Dans le cas de la centrale japonaise de Fukushima, nous ignorions les conditions, les besoins exacts, quel travail serait demandé aux engins. Les responsables japonais ont jugés inadaptés les matériels de notre catalogue actuel.
Que peuvent-ils faire dans une centrale accidentée ?
Michel Chevallier : Les engins intervenant à l'extérieur sont des robots chenillés et des engins de travaux publics. Les robots sont équipés d'un bras télémanipulateur, de caméras et d'instruments de mesure (température et radioactivité). Ils peuvent réaliser des prélèvements, ramasser des débris... Grâce à la liaison radio, ils peuvent être opérés à 5 kilomètres, ou plus avec relais. Nous avons également des engins de travaux publics : des camions-bennes et des grues. Ils peuvent être télécommandés depuis un poste blindé.
 peut s'introduire à l'intérieur d'un bâtiment, franchir des obstacles et des escaliers pour ramasser des objets, filmer, tourner une vanne... © Intra")
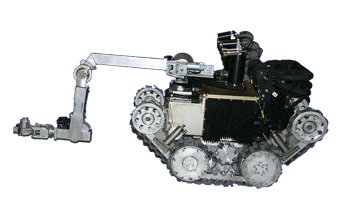
Eole (Engin d'Observation et de localisation dans l'Environnement) peut s'introduire à l'intérieur d'un bâtiment, franchir des obstacles et des escaliers pour ramasser des objets, filmer, tourner une vanne... © Intra
Vos robots sont aussi capables de s’introduire dans un bâtiment contaminé. Que peuvent-ils faire ?
Michel Chevallier : Les engins d'intérieur résistent à de fortes doses de radioactivité gamma. Ils sont entourés d'un blindage et leur électronique est « durcie », au sens où elle est conçue pour résister à des radiations. Ils ont de bonnes capacités de franchissement d'obstacles. Ces engins d'intérieur peuvent monter ou descendre un escalierescalier ou progresser dans un milieu difficile. Ils portent un bras manipulateur et des instruments de mesure. Ils peuvent par exemple ramasser un objet ou manœuvrer une vanne.
Quelles sont leurs limites ?
Michel Chevallier : C'est la commande par l'opérateur humain. À l'intérieur d'un bâtiment, les ondes radio passent mal et on ne peut pas utiliser cette technique. Tous nos engins d'intérieur sont donc filoguidés, avec un câble de 300 mètres. C'est leur limite principale car l'opérateur se trouve donc assez près du secteur d'intervention.
Des progrès sont-ils à espérer ?
Michel Chevallier : Comme vous le voyez, les deux principaux problèmes sont la tenue aux radiations et la transmission à l'intérieur des bâtiments. Nous travaillons actuellement pour progresser dans ces domaines. On peut améliorer le durcissement de l'électronique, améliorer les capacités des relais. Par ailleurs, nous travaillons actuellement à la mise au point de drones volants en mode stationnaire qui serviraient à l'inspection des lieux.











 ont été mis en service entre 1986 et 1992. © Gilles FRANCOIS, Flickr, CC by 2.0")
 a été exploitée de 1968 à 1985. La quasi totalité de la radioactivité présente sur site (combustible et eau lourde) était évacuée dès 1992. La fin des opérations de démantèlement est prévue pour 2025. © Perline, Wikipedia, CC by-sa 3.0")

")
 est un chantier complexe, qui s'étale sur plusieurs décennies. © Jean-Paul Comparin, Fotolia")
, responsables de quelque 40 000 décès en France. © Ponchita, Adobe Stock")




")


