

au sommaire
Victoria est un cratère d'impact d'environ 800 mètres de diamètre situé dans Meridiani Planum, près de l'équateuréquateur martien. Arrivée à la surface de la planète en janvier 2004, OpportunityOpportunity avait été dirigée vers cet endroit en raison des richesses géologiques qu'il peut révéler. Après avoir parcouru plus de 9 kilomètres dans des régions tourmentées, le robotrobot est enfin arrivé le 1er octobre à proximité du trou béant.
Après être resté un moment dans une partie du cratère appelée Duck Valley, Opportunity s'est ensuite rendu à Cape Verde, un promontoire situé plus au sud. C'est là qu'il a été observé par la caméra à haute résolutionrésolution HiRISE de MROMRO, et cette vue montre non seulement le robot, mais aussi les traces de roues dans le sablesable.
L'image, prise le 3 octobre et reçue le 6, est centrée par -7,8 degrés de latitudelatitude et 279,5 degrés de longitudelongitude est. La distance à la cible est de 297 km, et à cette valeur, la résolution au sol est de 29,7 cm par pixelpixel.


La zone d'exploration actuelle d'Opportunity à proximité du cratère Victoria. Les traces de roulage au sol sont nettement visibles, démontrant l'extrême pouvoir de résolution de la caméra HiRISE de Mars Reconnaissance Orbiter.

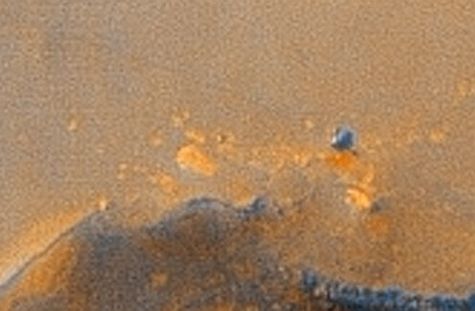
Détail du rover Opportunity, à la résolution maximale de la caméra HiRISE de Mars Reconnaissance Orbiter.

par Jean Etienne, Futura
le 11 octobre 2006

")

")







, haute d'environ trois mètres, longuement étudiée par Opportunity. © Nasa")
")

 de la Terre dans la constellation du Taureau. Elles sont aussi appelées « les Sept Sœurs », ou par les désignations astronomiques NGC 1432/35 et M45. © Nasa, ESA, AURA, Caltech, Palomar Observatory")

. Le Roc d’enfer culmine à 2.244 m en Haute-Savoie. Il s’étend entre la Suisse et la France et est l’un des plus hauts sommets du Chablais, deuxième massif plus étendu des Préalpes du Nord. © Pierre Thiaville, tous droits réservés")



, Mahdi Zamani (ESA/Hubble)")

