





au sommaire


Drones miniatures : les projets en cours
La création d'insectesinsectes volants micromécaniques (Micromechanical Flying Insect ou MFI) constitue l'un des projets du laboratoire de biométriebiométrie de l'université de Californie à Berkeley -- lequel s'est rendu célèbre en tentant de faire imiter par un robotrobot le déplacement vertical du geckogecko, et ce dès mai 1998. Selon Ronald Fearing qui dirige les opérations, l'ambition serait de développer un appareil de 10 mg et d'une envergure de 2,5 cm, capable de maintenir un vol autonome.
Un prototype d’insecte robotique volant réalisé par l’équipe de Ronald Fearing. © DR
Drones miniatures : reproduire le vol d'insectes
Le design du MFI est fondé sur des principes biométriques en vue d'obtenir la vitesse de vol exceptionnelle que manifestent les mouches elles-mêmes. Si l'équipe de Fearing dit avoir réussi à actionner une aile à la vitesse de 270 battements par seconde, rien n'indique que les chercheurs seraient parvenus à faire voler un tel engin.
L'auteur Jean-Jacques Cécile, dans un ouvrage consacré à l'usage potentiel d'un tel robot volant à usage militaire, a donné davantage de précisions sur leur constitution : « des feuilles d'acier inoxydable ultraminces pour la cellule et de Myar pour les quatre ailes ». Celles-ci sont animées par « un micromoteur piézoélectriquepiézoélectrique composé de cristaux ; ils changent de forme lorsqu'ils sont soumis à un courant électriquecourant électrique ».
Au Dickinson Lab lié à Caltech (Californie, États-Unis), l'équipe de Michael Dickinson mène des recherches liées au vol des mouches. Le projet appelé Robofly est décrit ainsi : « un équipement technique utilisé afin d'étudier et effectuer des mesures de l'aérodynamisme des insectes ailés ». De telles études sont loin d'être vaines si l'on considère que durant bien longtemps, le vol des insectes n'était pas modélisable mathématiquement. Dickinson se refuse toutefois à nous en dire plus sur ses recherches. Pourtant, dans une interview donnée à ScienCentral News, il reconnaît que ses expériences pourraient aider à créer des « robots volants autonomes ». Caltech mène par ailleurs des recherches sur un engin dont le vol serait inspiré de la samare, ce fruit sec de l'érable qui tombe en tourbillonnant avec un mouvement d'autorotation qui freine fortement sa chute. David Lentink, de l'université de Wageningen aux Pays-Bas et qui mène ces recherches avec Caltech, aimerait s'inspirer de ce lent tourbillonnement pour créer un microdrone dont la sustentation serait exemplaire.

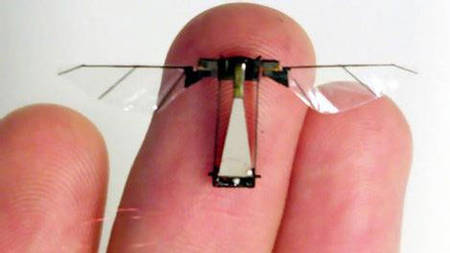
Mouche mécanique, Harvard Microbiotics. © Robert Wood
Les MAV, microvéhicules aériens
Un autre grand laboratoire de recherche sur les insectes robots est le Microrobotics Laboratory de l'université Harvard. Appelés microvéhicules aériens (Micro Air Vehicles, MAV), les MAV ont un poids de 60 mg et une envergure de 3 cm. Pour en fabriquer les composants ultrafins, il a fallu opérer au laser et les plier selon une technique que Robert Wood, qui dirige le laboratoire, compare à celle de l'origami. Au printemps 2007, le MAV a effectué son premier vol. Il est ainsi devenu le premier robot à deux ailes imitant le déplacement d'une mouche capable de s'élever dans les airs, avec toutefois une limitation : le MAV était assujetti à une microlonge qui l'aidait à maintenir une direction droite. Une nouvelle génération inclut un contrôleur interne, mais le Microrobotics Laboratory n'a pas encore fait savoir s'il avait réussi à voler.
Un fait demeure : aucun de ces centres de recherche n'est donc en mesure de présenter un insecte volant opérationnel et totalement autonome. En réalité, les chercheurs se doivent d'opérer à des tailles si réduites que l'aérodynamisme classique n'a plus cours.

par Daniel Ichbiah
le 21 mai 2010











 lors de son vol inaugural au-dessus de la ville du Dubaï. © Government of Dubai")





, au-dessus du lac Svityaz, en Ukraine. © Ihor Khomych, via Spaceweather")


