





au sommaire


Robotique humanoïde : perspectives de recherches
Pour finir, voici quelques perspectives de la recherche au JRL sur la robotique humanoïde :
- le mouvement « tout le corps » en 3D ;
- la manipulation ;
- l'interaction Homme-robotrobot.
La robotique humanoïde offre de nombreuses perspectives de recherche au JRL. © JRL-LAAS-CNRS
Le mouvement « tout le corps » en 3D
Dans l'approche décrite ci-dessus, les jambes sont faites pour marcher et les bras pour saisir et manipuler. Nous cherchons à étendre ce travail pour calculer des mouvements où l'ensemble des segments corporels peuvent participer à la tâche. Dans ce cas une tâche peut faire intervenir « tout le corps ». Les anglo-saxons parlent de « whole-body motion ».
Nous aimerions élaborer une méthodologie générale qui puisse exploiter tous les degrés de liberté pour réaliser telles ou telles tâches comme celles de prendre un objet, d'effectuer une marche, de garder l'équilibre, ou bien de maintenir la direction de regard.
Prenons l'exemple de la saisie d'un objet. Si l'objet se trouve dans une position basse, il faut se pencher, non seulement en utilisant la partie supérieure mais aussi en pliant le torse et les jambes. Pour prendre un objet qui se trouve un peu loin, le robot devrait faire un pas auquel cas aussi le mouvement des jambes doit être bien coordonné avec celui du reste du corps.
Dans cet objectif, nous avons proposé une méthode générale de gestion de mouvement « tout le corps » qui contient la capacité de déformation du polygone de sustentation qui est déclenchée automatiquement si nécessaire 5. La méthode est basée sur la réalisation des tâches en priorité proposées par Yoshihiko Nakamura6.
Les figures présentent les premiers résultats. La tâche consiste à mettre la main dans la position indiquée par la balle bleue. Les images de la première et deuxième lignes présentent le mouvement sans et avec la méthode proposée. Comme le robot doit maintenir le ZMP dans le polygone de sustentation initial en gardant la position horizontale du pelvis, le bras ne peut pas arriver à la position finale.
Par contre, avec la méthode de gestion de mouvement « tout le corps », la déformation du polygone de sustentation est automatiquement activée pour générer un pas vers la cible quand certaines mesures qui évaluent l'accomplissement de la tâche deviennent en dessous des seuils. Par conséquent, le robot parvient à bien mettre la main dans la position finale.
La troisième ligne présente le résultat de l'expérimentation dans laquelle la tâche est bien réalisée. On peut observer que le robot utilise tous les degrés de liberté pour cette tâche. Le mouvement est dynamiquement stable, les positions intermédiaires ne sont pas statiquement stables.
Enfin, une autre tâche, celle de garder le regard vers la cible, est ajoutée avec une priorité basse. Grâce à la méthode proposée et à la multitude de degrés de liberté du robot, cette tâche est aussi accomplie correctement.


La tâche est d'abord simulée en 3D, vient ensuite l'expérimentation conrète avec HRP-2. © JRL-LAAS-CNRS
Algorithme pour déformer le polygone de sustentation : quand le robot n'arrive pas à accomplir la tâche pour atteindre la cible, la procédure de déformation est automatiquement activée pour permettre au robot de faire un pas. © LAAS-CNRS/YouTube
Simulation et expérimentation de tendre la main vers l'avant. © LAAS-CNRS/YouTube
Simulation et expérimentation de tendre la main vers le côté. © LAAS-CNRS/YouTube
La manipulation « tout le corps »
Maintenant pour finir j'aimerais introduire brièvement le sujet de recherche sur la manipulation qui nécessite également le mouvement « tout le corps ».
Comme le robot humanoïderobot humanoïde a deux bras, on peut en profiter pour manipuler des objets encombrants. Nous nous concentrons sur une méthode « pivot ». L'idée est de déplacer un objet volumineux en le faisant pivoter sur un coin et de changer de posture comme lorsque l'on bouge seul un réfrigérateur. Ce mode de manipulation est avantageux au niveau de la précision par rapport au mode « pousser », et aussi est plus sûr.
Nous avons réussi à implémenterimplémenter un mouvement élémentaire comme les photos suivantes le montrent7. Le robot incline d'abord l'objet vers la droite pour le tenir sur un sommet. Ensuite il tourne l'objet et change de coin pour tourner dans l'autre sens.
L'étude de la planification pour se déplacer entre des positions et des orientations arbitraires est en cours. Nous nous intéressons également aux problèmes de la manipulation incluant l'évitement des obstacles et aux changements de prises.

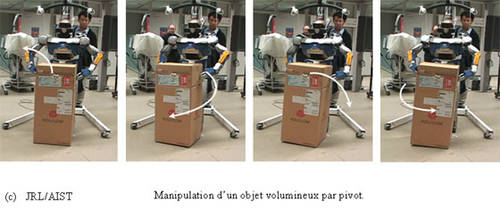
Le robot HRP-2 teste ici la technique du pivot. © JRL/AIST
Un autre aspect important est l'interaction Homme-robot. Il est bien clair qu'un robot humanoïde est doté d'une capacité de communication très élevée grâce à sa forme anthropomorphique.
Pour développer cette capacité, nous cherchons à générer des mouvements du robot qui soient acceptables et compréhensibles par l'Homme. Supposons que le robot humanoïde tende un objet à l'Homme. Ce qui est très évident pour nous, ne l'est pas du tout pour le robot. Pour tendre un objet, il y a une infinité de solutions quant au positionnement du robot (voir la figure ci-dessous).
Si on ne tient pas compte de l'acceptabilité sociale et culturelle du mouvement, la solution peut aboutir à ce que l'on constate sur les figures à gauche. Or, le robot doit respecter certaines règles dans sa relation avec l'Homme : il de doit pas être trop près de lui et il doit s'en approcher en entrant dans son champs de visibilité avec une certaine distance pour ne pas le surprendre. Donc, il est nécessaire d'évaluer les préférences de l'Homme et les comportements qui s'y rattachent dans le développement de nos recherches futures où l'interaction Homme-robot entre en jeu.

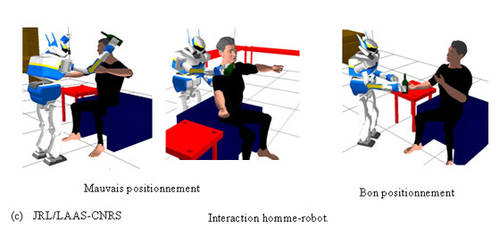
Le robot doit respecter certaines règles dans son interaction avec l'humain. © JRL-LAAS-CNRS
Les résultats présentés jusqu'ici ne traitent pas les informations de la perception : on suppose que l'environnement est complètement connu par le robot. Après avoir intégré le système de vision pour permettre au robot d'explorer l'environnement en utilisant les informations 3D acquises par ces capteurscapteurs, il faut tenir compte de l'incertitude de mesure pour la planification.
Pour conclure, le groupe Gepetto du LAAS-CNRS, conduit très activement des recherches interdisciplinaires, liées au mouvement humain, humanoïde et des acteurs digitaux.
Des collaborations de recherche avec des chercheurs en neurosciences pour mieux comprendre la commande du mouvement humain sont nées et la plateforme humanoïde est très utile pour tester les hypothèses que l'on établit.
En ce qui concerne les recherches en animation graphique, la plausibilité au niveau physique devient de plus en plus importante à fur et à mesure des progrès en animation. Là aussi, la plateforme HRP-2 offre de nombreuses possibilités.
Pour finir, je voudrais exprimer mes sincères remerciements à Jean-Paul Laumond, codirecteur du JRL-France, qui a contribué énormément au succès de la mise en place des activités du JRL.
Je tiens également à remercier tous les collègues qui s'investissent pleinement dans ce projet international passionnant aussi bien au Japon qu'en Europe. Enfin je présente ma reconnaissance profonde à Delphine Maillet-Mongeau, qui a corrigé le texte entier avec beaucoup de patience.





. Ce bras, clairement visible à droite de l'image est installé sur le segment russe de la Station spatiale. © Nasa")


 robot anthropoïde, conçu au Japon par l'AIST, au milieu de danseuses humaines. Pour l'instant, il est facile de faire la différence... © AIST/YouTube")
 robot anthropoïde, conçu au Japon par l'AIST, au milieu de danseuses humaines. Pour l'instant, il est facile de faire la différence... © AIST/YouTube")
 du 24 au 26 octobre 2017. © Rémy Decourt")












