





au sommaire


JRL, le laboratoire franco-japonais en Robotique
Depuis 2006, le Laboratoire international associé franco-japonais en robotiquerobotique (JRL, Joint Robotics Laboratory) est situé en France, à Toulouse. Quelles sont les recherches de ce laboratoire en matière de robotique ? Quelle est sa spécificité ? Eiichi YoshidaEiichi Yoshida nous répond.
En novembre 2006, un nouvel accord a été signé entre le CNRS (Centre national de la recherche scientifique) et l'AIST (National Institute of Advanced Industrial Science and Technology, Japon), pour la localisation à Toulouse, au LAAS (Laboratoire d'architecture et d'analyse des systèmes) du JRL (Joint Robotics Laboratory), Laboratoire international associé franco-japonais en robotique.
Initié par Dr. Philippe Coiffet et Prof. Kazuo Tanie fin 2003, ce laboratoire conjoint poursuit l'accroissement de l'autonomieautonomie des robotsrobots, plus particulièrement au travers de travaux conduits sur les robots humanoïdes.
À cet égard les robots humanoïdesrobots humanoïdes constituent donc le support commun des recherches conduites par le JRL.
Les spécificités du JRL
La spécificité de ce laboratoire se situe dans la création de deux sites équivalents côté France et côté Japon : chacune des entités nationales est dirigée par deux codirecteurs, un Français et un Japonais. Ainsi, concernant la France, le JRL-France, codirigé par Jean-Paul Laumond et moi-même est localisé au LAAS-CNRS (Laboratoire d'analyse et d'architecture des systèmes) à Toulouse. Une coopération étroite est à mentionner avec le LIRMM (Le Laboratoire d'informatique, de robotique et de microélectronique de Montpellier).
Enfin, autre caractéristique du JRL, chaque site dispose d'un robot HRP-2 comme la plateforme de recherche.
Ainsi, en échangeant les chercheurs entre deux sites pour former des équipes mixtes internationales, nous cherchons à conduire la recherche de façon complémentaire et espérons avoir des résultats très créatifs grâce à cette synergiesynergie franco-japonaise.
Au JRL-Japon installé à l'ISRI-AIST (Intelligent Systems Research Institute, AIST), qui a démarré dès l'année 2003, on poursuit les thématiques comme le bouclage entre la vision et mouvement, la téléopération, et l'haptiquehaptique. Ils ont produit de nombreux résultats dont une partie a été présentée à l'exposition universelle de Aichi au Japon.
Quant au JRL-France, après un an de relocalisation au LAAS-CNRS, nous avons beaucoup évolué en développant plusieurs aspects grâce aux investissements du CNRS et des collègues français, j'aimerais ici citer le codirecteur du JRL-France, mon collègue Jean-Paul Laumond. L'équipe est composée d'une dizaine de personnes, des chercheurs permanents, des postdocs et des thésards. Les évolutions principales se trouvent dans les points suivants :
- acquisition de la plateforme HRP-2 ;
- lancement du projet JRL au niveau national français ;
- résultats scientifiques : planification de mouvement dynamique en 3D.
Voyons plus en détail ces trois points.
Acquisition de la plateforme HRP-2
Cette acquisition s'est effectuée conformément à l'agrément du JRL qui définit l'installation de cette plateforme. Le robot est arrivé en avril au LAAS-CNRS et a été mis en route en mai 2006 par Kawada Industries, le fabricant du robot.


Reproduction et utilisation interdites
Même si nous avons un bon simulateur qui reproduit le phénomène physique du robot, il est, bien entendu, très important de vérifier les résultats de recherche dans le monde réel.
Les expérimentations nous permettent de reconnaître les problèmes scientifiques et d'avoir des idées sur comment les résoudre, par exemple sur des mouvements dynamiques, ou la perception et l'interaction avec les Hommes.
Ce robot ayant été conçu comme une plateforme de recherche, nous avons beaucoup de liberté sur ce que nous pouvons programmer sur ce robot. Aussi, il est indéniable que l'arrivée de ce robot a eu un effet très positif sur la motivation des chercheurs.
Ainsi, par exemple, si on a une idée, on l'approfondit, le programme est tout de suite testé avec le robot. Le travail se fait ici avec beaucoup d'enthousiasme.
Lancement du projet JRL au niveau national français

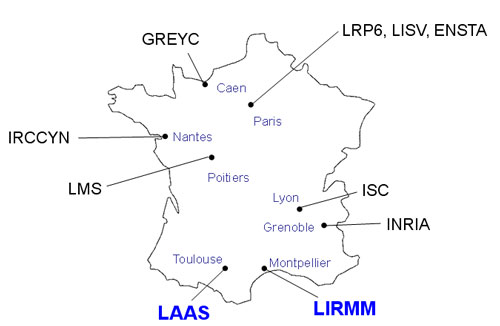
Pour que chacun puisse bénéficier de l'investissement important pour le développement de la robotique en France, le CNRS nous a encouragés à ouvrir cette plateforme au niveau national. Étant entièrement d'accord avec cette idée, le JRL-France a lancé un appel à projets JRL en janvier 2006. Cet appel reçut de nombreuses propositions non seulement de la part des laboratoires de robotique mais aussi de ceux des sciences cognitivessciences cognitives et d'intelligence artificielle. Les projets ont été évalués par des experts en fonction des besoins d'accès aux ressources (le robot et le logiciellogiciel). Ainsi, l'appel a retenu 15 projets provenant de 10 laboratoires (voir le plan).
La politique de ce projet est que le JRL-France offre aux participants l'accès à la plateforme hardwarehardware et logiciel, mais aussi la formation. Même s'il n'y a pas d'autres supports, ce principe leur fournit une occasion particulière pour enrichir et faire évoluer leur recherche.
D'ailleurs, le JRL-France a organisé une semaine de formation pour ces participants au mois de juin 2006. Une vingtaine de participants de ces dix laboratoires ont suivi le cours du logiciel KineoWorksTM, qui est le produit d'une start-upstart-up née des résultats de recherche du LAAS-CNRS et du logiciel de contrôleur du robot OpenHRP.
Deux journées ont été consacrées aux travaux pratiques qui leur ont permis de savoir comment programmer le robot. Tous les participants ont pu examiner leur programme d'essai et tester la capacité du robot comme une plateforme facilitant son utilisation. Sur la seconde photo ci-dessous, on peut voir un exemple des résultats de cette formation : Dr. Peter Dominey de ISC-CNRS (Institut des sciences cognitives) a réussi à connecter son outil de programmation du langage parlé avec le logiciel OpenHRP pour commander le robot avec son propre système. La formation a ainsi fini avec succès en encourageant les participants à pousser leurs projets. La semaine s'est conclue par une journée de workshop où tous les projets ont été présentés et par la présentation officielle du robot HRP-2 au public (30 juin 2006).


© LAAS-CNRS


© LAAS-CNRS
Nous sommes très confiants, Jean-Paul Laumond et moi-même, en tant que codirecteurs du JRL, de la capacité de ce projet à rassembler autour de cette plateforme humanoïde des domaines de recherche très divers.
Ainsi par exemple, ce projet a motivé les recherches autour de l'humanoïde en général, hors du JRL même, puisque d'autres projets ANR (Agence nationale de recherche) ont été acceptés sur des thématiques apparentées.
Au niveau du LAAS-CNRS, un nouveau groupe de recherche baptisé « Gepetto » a été créé pour conduire les recherches autour de ce robot humanoïde avec le leadership de Jean-Paul Laumond.
Résultats scientifiques : planification de mouvement dynamique en 3D
Après seulement une année depuis la nouvelle localisation du JRL-France au LAAS-CNRS, et grâce aux efforts intensifs de collaboration, les premiers résultats ont été au rendez-vous, surtout sur la planification et le contrôle de mouvements dynamiques pour l'humanoïde.












, c’est un jardin de type Tsukiyama, c'est-à-dire un composé de collines artificielles. Il est une synthèse des jardins japonais et a été conçu pour offrir le plus d’intimité possible dans une mise en scène des mondes minéral, végétal et aquatique, avec notamment d’un plan d’eau avec son île au milieu, l’ensemble est agrémenté de nombreux éléments décoratifs typiques et d’un pavillon des thés. Une belle promenade, classée « Jardin remarquable de France » agrémentée de panneaux explicatifs pour s’immerger dans la culture japonaise chère au cœur du son créateur.Lac et pavillon du thé, jardin japonais de Toulouse © PierreSelim, CC by 3.0")










")
