
au sommaire


Exemple de main robotique dont les 5 doigts peuvent recevoir un capteur BioTac. © SynTouch LLC
Le toucher est l'un des sens les plus complexes à reproduire en robotique, mais il peut ouvrir la voie à des avancées cruciales, notamment dans le domaine des prothèses des membres supérieurs. Deux chercheurs de la Viterbi School of Engineering rattachée à l'University of Southern California viennent de publier une étude montrant comment un robot équipé de capteurscapteurs tactiles est capable d'identifier des texturestextures avec une précision parfois supérieure à celle d'un humain. Il s'agit de Gerald Loeb, spécialisé en ingénierie biomédicale, et de Jeremy Fishel, un jeune doctorant qui a fabriqué le robot.
Le capteur en question, qui porteporte le nom de BioTac, est fabriqué par la société SynTouch LLC, une start-up américaine fondée en 2008 à laquelle les deux hommes sont associés.
BioTac reproduit les capacités sensorielles du doigt
Dans sa forme et sa texture, BioTac imite l'extrémité d'un doigt humain. Sa structure est faite d'une coque dans laquelle sont placées plusieurs sortes de capteurs (pressionpression, thermique, électrodesélectrodes) qui vont récolter les informations. Cette structure est enrobée d'un revêtement en siliconesilicone qui simule la peau en reproduisant les microsillons des empreintes digitales. Entre la coque et la peau en silicone, un fluide conducteur électrique va faire l'interface. Résultat, BioTac parvient à rassembler les propriétés mécaniques et les capacités sensorielles d'un doigt humain.
Lorsqu'elle entre en contact avec un objet extérieur, la peau du capteur se déforme et fait alors circuler le fluide autour des électrodes. L'effet produit sur les différents capteurs permet de déterminer le point de contact, la magnitudemagnitude, la direction et la forme d'un objet.
, puis le liquide conducteur (<em>conductive fuid</em>), les électrodes, la thermistance (<em>thermister</em>) et le capteur de pression (<em>pressure sensor</em>). © SynTouch LLC")
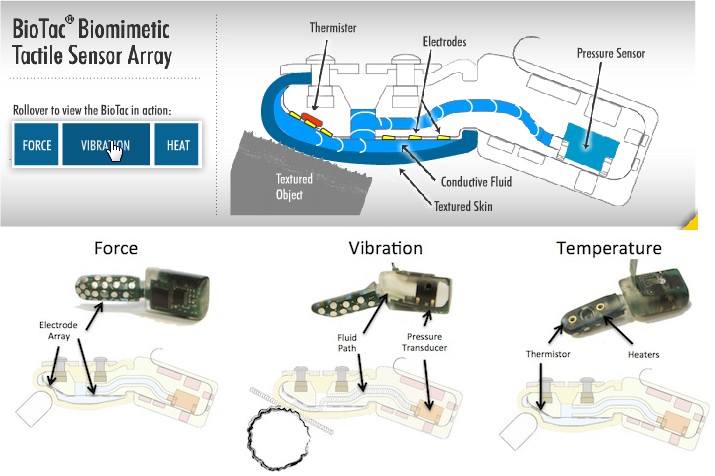
Détails du fonctionnement du capteur BioTac lorsqu’il entre en contact avec une texture rugueuse. On distingue la peau en silicone parsemée de microsillons (textured skin), puis le liquide conducteur (conductive fuid), les électrodes, la thermistance (thermister) et le capteur de pression (pressure sensor). © SynTouch LLC
« Nous utilisons des capteurs thermiques et des thermistances pour détecter la température. Par exemple, nous sommes en mesure de déterminer que le métalmétal est plus froid que le boisbois, comme peut le faire un humain », a expliqué à Futura-Sciences Jeremy Fishel. Pour détecter la température d'un objet, le système se sert de la chaleurchaleur dégagée par l'électronique embarquée dans le capteur pour chauffer le doigt au-delà de la température ambiante, comme c'est le cas pour un doigt humain. Une thermistance qui court sous la peau en silicone va alors mesurer la différence de température entre la surface du capteur et celle de l'objet et en déduire s'il est chaud ou froid. Lorsque le doigt du robot frotte une surface, les microsillons du revêtement produisent des vibrationsvibrations qui sont enregistrées par le capteur de pressioncapteur de pression. Cela permet au système de distinguer avec beaucoup de précision les nuances entre différentes textures.
Mais BioTac peut aussi reconnaître les formes. « Nous avons fait des recherches qui montrent que nous pouvons reconnaître des formes en distinguant les bords, les coins, les surfaces planes et même la courbure des objets », poursuit le chercheur.
L’algorithme est la clé de voûte du système
Reste que toutes les informations récoltées ont besoin d'être interprétées pour qu'une information puisse en sortir. C'est le rôle d'un algorithme et c'est précisément ce qui a fait l'objet de l'étude publiée par Geral Loeb et Jeremy Fishel. Les deux hommes ont concentré leurs travaux sur la reconnaissance de texture qui est la base du toucher.
Dans le processus du toucher, les humains explorent un objet avec un certain nombre de mouvementsmouvements qui sont déterminés par rapport à leur expérience passée. De chaque mouvement résulte une information qui va décider quel sera le mouvement suivant à effectuer pour récolter une autre information et ainsi de suite jusqu'à obtenir assez de données sur un objet ou une surface. L'algorithme associé à BioTac imite cette approche empirique en déterminant quel est le prochain mouvement exploratoire à effectuer. Les deux chercheurs ont donc réussi à théoriser ce principe baptisé « exploration bayésienne » en référence au mathématicienmathématicien Thomas Bayes auteur du théorèmethéorème éponyme sur une loi des probabilités qui est notamment utilisée pour lutter contre le spam.
Dans le cas du robot, le processus du toucher se déroule de la manière suivante. Il stocke en mémoire des textures et propriétés d'objets rencontrés auparavant. Lorsqu'il est confronté à une texture inconnue, il puise dans sa mémoire pour déterminer le niveau de similitude avec ce qu'il touche. Cette information est alors utilisée pour décider quel sera le mouvement suivant à effectuer. « Le processus de sélection des mouvements et de comparaison avec la mémoire est répété jusqu'à ce que le robot atteigne un taux de confiance de 99 % », précise Jeremy Fishel. Pour l'expérience, le robot conçu par le chercheur a été entraîné avec 117 textures différentes provenant de matériaux courants. En moyenne, il a fallu 5 mouvements exploratoires pour identifier une texture avec un taux de réussite de 95,4 %.
Pour quelles applications ?
SynTouch LLC vend ses capteurs BioTac depuis environ un an à d'autres chercheurs ainsi qu'à des fabricants de robots industriels. Interrogé sur le prix d'un tel capteur, Jeremy Fishel nous a expliqué que SynTouch ne souhaitait pas le communiquer. « Il s'agit d'un produit haut de gamme, vendu en très petits volumesvolumes à des personnes qui travaillent sur des applicationsapplications de recherche de pointe. »
Mais la société travaille surtout sur des prothèses de mains dont les doigts sont équipés de capteurs BioTac. L'un des défis consiste à mettre au point un algorithme capable de gérer la préhension en ajustant la pression selon ce qui est saisi. Second défi, et certainement le plus prometteur, développer un système capable de renvoyer un retour sensoriel au porteur d'une telle prothèseprothèse au moyen d'effets haptiques (vibrations, température, force).
« Imaginez une situation où vos doigts sont engourdis par le froid, vos mains sont presque inutiles. Même si vos muscles sont fonctionnels, si vous ne pouvez pas sentir ce que vous touchez, ça glisse, vous ne pouvez pas identifier les choses, c'est comme si vos mains étaient paralysées. En ajoutant le toucher à des prothèses de mains, nous pouvons dépasser ce problème et avoir des prothèses qui ont de vraies fonctionnalités », commente Gerald Loeb. Si la technologie BioTac est donc aboutie d'un point de vue matériel, le gros du travail repose maintenant sur la partie logicielle qui pourra ouvrir la voie à de multiples applications.



 du 24 au 26 octobre 2017. © Rémy Decourt")
. © Intuitive Surgical")












. © Dall.E")






