




au sommaire


Les drones de demain
Parmi les nombreux axes de recherches possibles, deux objectifs doivent être atteints : la miniaturisation et la coopération air-sol.
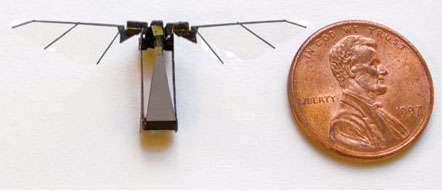
En ce qui concerne la miniaturisation, de très grandes avancées ont été effectuées récemment. On peut en particulier citer le travail de Robert Wood, Professeur a Harvard Microbiotics Lab., qui a réussi à développer un |fcd9023ff86fba0d174c4f8e60609c75|-insecteinsecte de seulement 3 cm et pesant moins de 60 milligrammes (en excluant les batteries et les capteurscapteurs). Une telle miniaturisation a soulevé non seulement plusieurs problèmes mécaniques et techniques (la fabrication en tant que telle) mais aussi plusieurs difficultés théoriques, comme par exemple en aérodynamique.
En France, l'ONERA travaille sur REMANTA (REsearch program on Micro Aerial vehicle and New Technologies Application), plus précisément un micro véhicule aérien à ailes battantes dont l'envergure est de 15 cm maximum.
Remanta - De l'usage d'un microdrone
Ce projet s'attache à répondre aux différentes questions posées par le développement d'un tel drone : mécanique du vol et pilotage, aérodynamique, matériaux, actionneurs, etc... En raison de ces nombreuses difficultés, les applications de ces projets de recherche ne devraient pas avoir lieu avant 10-15 ans.
Le premier robot-insecte volant du monde
Video :
http://harvardmagazine.com/web/extras/robotic-fly

Le deuxième objectif est la coopération entre véhicules aériens et véhicules au sol, chacun ayant ses propres avantages et limites. La coopération peut avoir lieu à plusieurs niveaux. Par exemple, la fusion des estimations de pose des différents véhicules permettra d'obtenir des estimations plus précises et plus robustes pour les véhicules aériens et au sol ; en environnement intérieur, les drones sont privés de signaux GPSGPS mais pourraient être localisés/positionnés en utilisant les estimations de position de véhicules au sol.
Un drone en position au-dessus d'une zone pourrait également guider un véhicule terrestre en lui fournissant une vue plus générale de la zone. On peut citer le travail effectué à Berkeley pour des situations de poursuite à l'aide de véhicules aériens et terrestres : les poursuivants construisent simultanément une carte de l'environnement et se localisent par rapport à cette carte et aux cibles à suivre. Ces algorithmes de coopération fournissent des résultats très intéressants mais doivent être améliorés afin d'être utilisés en mission réelle.
<br><a target=\"_blank\" href=\"http://www.eecs.berkeley.edu/IPRO/Summary/Old.summaries/03abstracts/chapter3.html\">http://www.eecs.berkeley.edu/IPRO/Summary/Old.summaries/03abstracts/chapter3.html</a>")

http://www.eecs.berkeley.edu/IPRO/Summary/Old.summaries/03abstracts/chapter3.html

par Jean-Charles Bazin, Futura
le 28 septembre 2008











 et en vertical de 6 m/s. Il est équipé d’un système de Contrôle intelligent d’orientation (CIO) et d’un GPS. Son temps de vol maximum varie entre 10 et 15 minutes. Lorsque la communication entre le contrôle principal et l’émetteur est coupée, le système GPS ramène automatiquement l’engin à son pilote et le pose au sol.
© Don McCullough, CC by-nc 2.0")











