

au sommaire
Le premier anniversaire martien de Curiosity a mis en évidence le principal reproche fait à l'exploration robotiquerobotique de surface de la planète Mars, à savoir les très faibles vitesses de déplacement et distances parcourues par les rovers sur les terrains de la Planète rouge.
En effet, plus d'un an après ses premiers tours de roue, le rover Curiosity a parcouru moins de deux kilomètres, une très faible distance au regard de ses capacités. Ce rover est le plus sophistiqué et le plus grand jamais envoyé sur Mars. Son système de locomotion à six roues motrices de 50 cm de diamètre lui permet de franchir des obstacles de 65 cm, de gravir des pentes à 45° et de parcourir jusqu'à 200 mètres chaque jour. En clair, il est conçu pour parcourir plus d'une vingtaine de kilomètres tout au long de sa mission, qui doit durer une année martienne. Autre exemple significatif, plus de neuf ans après son arrivée sur la Planète rouge, en janvier 2004, Opportunity, un des deux rovers de la mission MER (Mars Exploration Rover), a parcouru seulement un peu plus de 38 kilomètres !
. Le rover totalise seulement 1.686 mètres parcourus. © Nasa, JPL")
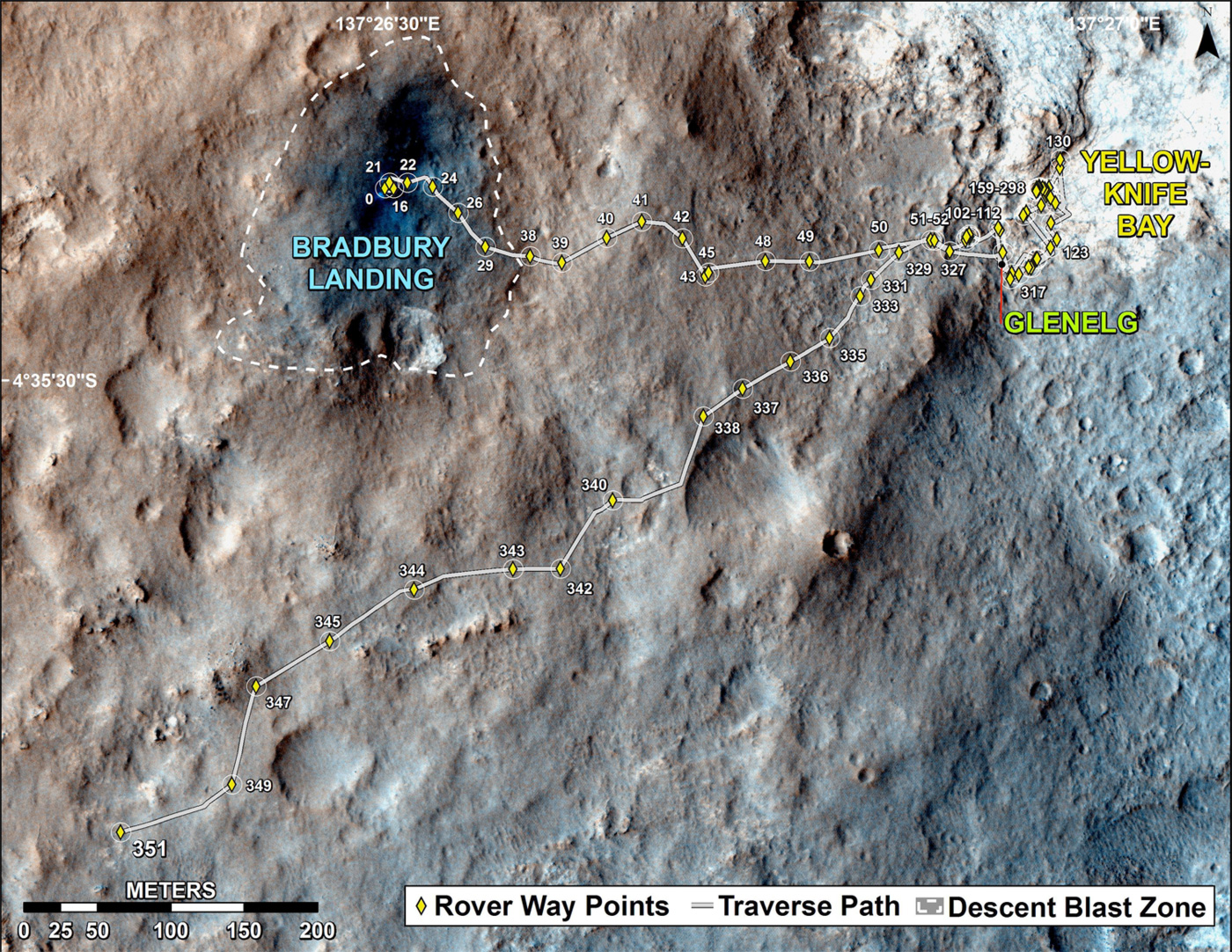
Le parcours de Curiosity au 1er août 2013, depuis son arrivée le 6 août 2012 (en haut). Le rover totalise seulement 1.686 mètres parcourus. © Nasa, JPL
En cause, le caractère exploratoire des missions, qui amène les rovers à se déplacer sur des terrains inconnus. Le risque de coincer ces engins dans le sablesable ou de les voir endommagés par des collisions avec d'autres obstacles est la préoccupation majeure des responsables des missions martiennes. Pour éviter tout risque d'accidentaccident ou d'incident, ces rovers se déplacent donc très lentement, et ne couvrent que quelques mètres par jour. Ce n'est donc pas pour des raisons scientifiques liées à l'étude des roches ou autres caractères géologiques rencontrés que les rovers martiensrovers martiens se déplacent à pas de loup, mais bien en raison de la nature inconnue des terrains.
Faire rouler plus vite les rovers
Ce qu'il faut comprendre, c'est que les routes des rovers sont tracées quasi quotidiennement par les contrôleurs au sol à partir des données fournies par les rovers eux-mêmes et les satellites en orbite autour de Mars. Et c'est là que le bât blesse. Aucun rover n'est autonome dans sa prise de décision. Les données relayées nécessitent un temps de traitement, et les cartes ne sont pas suffisamment précises pour autoriser des vitesses de quelques kilomètres par jour.
Cela dit, dans ce domaine, des progrès sont attendus. Alors que les agences spatiales planifient de nouvelles missions d'exploration robotique sur la Lune et Mars, le projet Faster pourrait changer la donne. Financé par l'Union européenne dans le cadre du 7e Programme-cadre pour la recherche et le développement technologique (FP7), principal instrument financier européen de soutien à la recherche, ce projet, intitulé Faster (Forward Acquisition of Soil and Terrain for Exploration Rover) tente d'augmenter les vitesses de déplacement des rovers en améliorant l'anticipation des obstacles ou des dangers par une technologie de capteurscapteurs au sol contrôlant la coopération du rover et d'un logiciellogiciel.
L'idée est d'utiliser un binôme de rovers, dont l'un partirait en éclaireur pour préparer la route du rover principal, dont l'activité serait uniquement scientifique. Pour rendre ce concept opérationnel, l'industrie a besoin d'une nouvelle génération de capteurs pour l'analyse de la surface, la préventionprévention des risques et une collecte de données plus rapide.












")
, Opportunity (2004) et Curiosity. © Nasa, JPL-Caltech")
 par la caméra panoramique (Pancam) d’Opportunity. Depuis la crête de Murray, au sommet des remparts ouest du vaste cratère d’impact, le rover profite d’un point de vue inédit sur les bordures est et sud-est d’Endeavour, distantes de 21 km. Beaucoup plus proche (environ 2 km), à droite de l’image, en direction du sud, se trouve son prochain site d’investigation, le Cap Tribulation. Au fond du cratère, on peut observer des dépôts de sables, de poussières et au lointain, un voile brumeux de poussières. © Nasa, JPL-Caltech, Cornell University, Arizona State University")





, au-dessus du lac Svityaz, en Ukraine. © Ihor Khomych, via Spaceweather")



