
au sommaire


Ce robot sous-marin conçu à l’université japonaise d’Okayama est capable de se déplacer de façon autonome et de repérer des cibles avec une précision de cinq millimètres. Pour cela, il associe une technologie de vision en 3D stéréoscopique avec un sonar. © Okayama University
Si les robots autonomes terrestres ont déjà démontré leurs capacités dans de nombreux domaines, des versions sous-marines aussi performantes n'existent pas encore, pour le moment... Car au Japon, des chercheurs travaillant pour l'université d’Okayama ont construit un robot sous-marinsous-marin doté d'un système de navigation autonome qui pourrait évoluer au fond des mers ou des lacs pour accomplir toutes sortes de tâches.
Selon la description de ses concepteurs, l'engin est un MOS/AUV (Move on Sensing/Autonomous Underwater Vehicle), c'est-à-dire un appareil sous-marin autonome qui se déplace en détectant son environnement. L'engin combine un système de vision en 3D stéréoscopique utilisant deux caméras vidéo CCDCCD et un sonarsonar classique. « La navigation sous-marine avec cette association de détection sonore et visuelle permet à notre véhicule amphibie autonome de détecter et suivre des cibles avec une précision de cinq millimètres », explique le professeur Mamoru Minami qui dirige ce projet. S'appuyant sur des essais menés avec des robots terrestres, le scientifique affirme que la précision pourrait même être améliorée jusqu'à 0,5 millimètre.

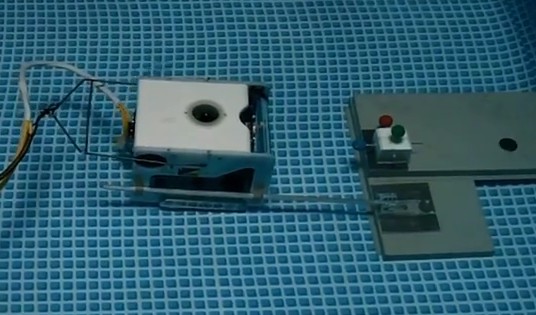
Pour tester leur robot, les chercheurs de l’université d’Okayama ont simulé une procédure d’arrimage à une station de charge. Le robot devait aller insérer son guide dans un anneau de sept centimètres de diamètre en s’aidant de marqueurs optiques placés sur la cible. © Okayama University/YouTube
Un potentiel d’applications au-delà du sous-marin
Ce type de robot sous-marin pourrait servir dans divers domaines, à commencer par des travaux de décontamination de zones polluées par des matériaux radioactifs. Il pourrait aussi être employé pour l'exploration minière à la recherche de métauxmétaux rares ou d'hydrate de méthane. Les chercheurs japonais citent également des tâches de maintenance d'infrastructures sous-marines telles que les câbles de télécommunications ainsi que des missions de surveillance environnementale, d'observation de la faunefaune marine ou encore de récupération de débris et déchetsdéchets. « Nous pouvons envisager des applicationsapplications autres que sous-marines, ajoute le professeur Minami. Par exemple, pour l'arrimage des vaisseaux spatiaux ou des robots autonomes pour construire une base sur la LuneLune. » Cependant, tout cela est encore assez lointain.
Un prototype de ce MOS/AUV a été testé en piscine. Le robot devait effectuer une manœuvre consistant à venir s'arrimer à un anneau de sept centimètres de diamètre pour simuler une charge de batterie. On peut observer la manœuvre du point de vue du robot et de l'anneau d'arrimage dans ces vidéos publiées sur YouTube. Le système de vision en 3D se base sur des marqueurs lumineux placés sur la cible tandis qu'un algorithme croise les images en temps réel avec des représentations en 3D de l'anneau d'arrimage. Le robot est capable de suivre des objets en mouvementmouvement à une vitessevitesse allant jusqu'à 10 mm/s. L'équipe de l'université d'Okayama précise qu'à terme, leur robot n'aura pas besoin d'aller se connecter à une station de charge mais pourrait utiliser une technologie à induction pour alimenter sa batterie.

















. © Dall.E")






