
au sommaire
. Le bras s'apprête à simuler ce que ne devrait jamais faire un robot : frapper un être humain. © Institute of Robotics & Mechatronics/DLR")
. Le bras s'apprête à simuler ce que ne devrait jamais faire un robot : frapper un être humain. © Institute of Robotics & Mechatronics/DLR")
Un « crash test » impliquant le bras robotique mis au point au DLR (Allemagne). Le bras s'apprête à simuler ce que ne devrait jamais faire un robot : frapper un être humain. © Institute of Robotics & Mechatronics/DLR
Il a fallu plusieurs années de recherche pour que l'on puisse jouer avec le Light Weight Robot (LWR), simple bras robotisé. Aujourd'hui, les chercheurs allemands qui l'ont mis au point à l'Institut de robotique de mécatronique, dépendant du DLRDLR (le centre national de recherche aéronautique et spatiale en Allemagne), en sont à la troisième version. Bien loin de là, à l'université de Pise, en Italie, le groupe de robotique du Centre Piaggio de robotique et de bio-ingénierie, mené par Antonio Bicchi, travaille sur le même sujet. Ces chercheurs viennent de montrer la deuxième mouture de leur VSA (Variable Stiffness Actuator).
Les deux équipes font partie d'un projet européen financé sur trois ans et qui se terminera en septembre 2009, baptisé Phriends (Physical Human-Robot Interaction Dependability and Safety). L'objectif est de mettre au point une technologie fiable pour réaliser des robots anthropoïdesanthropoïdes sécurisés, c'est-à-dire sans danger pour les êtres humains qui les côtoient. Le romancier Isaac Azimov, qui avait imaginé les lois de la robotique, stipulant notamment qu'un robot ne doit jamais faire de mal à un être humain, aurait beaucoup apprécié.

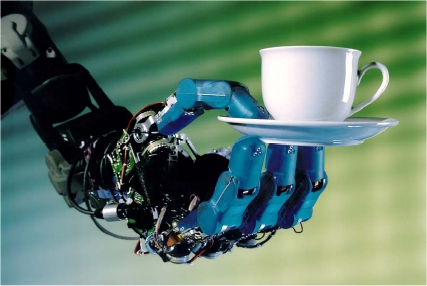
Un robot capable d'interactions constructives avec les humains devra savoir être délicat. © Institute of Robotics & Mechatronics/DLR
Cette innocuité ne va pas de soi pour des appareils munis de moteurs puissants, capables de se déplacer, d'effectuer des mouvementsmouvements de grandes amplitudes, de soulever des charges et en général constitués d'un squelette métallique. Lâchés dans la vie de tous les jours et ses mille embûches, ces robots ne pourront se contenter de dire « oh pardon » lorsqu'un de leur bras aura assommé un collaborateur humain.
Penser aux risques dès la conception du robot
L'ensemble des mesures à prendre au moment de la conception concerne tous les domaines, la structure du robot elle-même, son revêtement, les capteurscapteurs, les caméras, mais aussi logiciels pilotant le tout, y compris la prise en compte de leurs plantages possibles. « L'approche classique est de concevoir et de construire les robots dans l'optique d'une tâche précise, commente Antonio Bicchi. Ceux développés dans le cadre de Phriends seront intrinsèquement sûrs car cette sûreté est garantie par leur structure physiquephysique et non par des capteurs extérieurs ou des algorithmes qui peuvent faillir. »


Des chercheurs allemands jouent avec un robot armé de deux bras LWR, qui ne devront jamais blesser. Cette image est extraite d'une des vidéos proposées par le laboratoire. © Institute of Robotics & Mechatronics/DLR
Par exemple, le bras VSA est actionné par des moteurs antagonistes, produisant des mouvements opposés. C'est d'ailleurs ainsi que fonctionnent le contrôle musculaire d'un membre chez un animal. Dans le bras LWR de l'équipe allemande du DLR, les capteurs sont intégrés et installés au niveau de chaque articulationarticulation. Le système repère donc facilement tout choc, même minime.
Le poids, ou plutôt la massemasse, participe aussi au danger. Plus il est léger, moins le robot risquera de blesser son entourage. Capable de porter une charge de 15 kgkg, le bras LWR ne pèse que 13,5 kg. Avec ses 7 degrés de liberté (comme un bras humain), il peut effectuer ses mouvements dans volumevolume plus réduit que les classiques robots industriels, dans lesquels les degrés de liberté sont limités au minimum nécessaire pour des raisons de coûts.
Avec ses joints en fibre de carbonefibre de carbone, son réseau d'échange de données internes en fibre optique et ses capteurs multiples, le bras LWR ne sera jamais un bon modèle pour la robotique industrielle. Mais ces travaux du projet Phriends seront en revanche indispensables pour mettre au point des robots anthropoïdes capables de se lancer dans les interactions physiques avec les humains, ou pHRI (physical human-robot interactions), une question qui taraude aujourd'hui les roboticiens.




 chasse-neige coopèrent pour nettoyer la piste. © M. Saska, M. Hess, K. Schilling")


")






 et ses performances (500 grammes soulevés) sont loin de la belle réussite des proboscidiens… © Festo")









