

Le robot Dextre de l’Agence spatiale canadienne, installé à l’extérieur de la Station spatiale depuis mars 2008, va réaliser en février sa première mission opérationnelle. La Nasa vient de donner son feu vert après avoir confirmé les capacités de ce robot. Pour le Canada, en pointe dans la robotique, ce succès préfigure des systèmes robotiques autrement plus ambitieux.
au sommaire
Dextre, pour Manipulateur agile spécialisé (Special Purpose Dexterous Manipulator), fait partie du système d'entretien mobilemobile, un des éléments essentiels de la Station que fournit le Canada au titre de sa participation au programme de l'ISS. Outre Dextre, ce système est constitué du Canadarm2 (Space Station Remote Manipulator System) et de la base mobile (Mobile Base System).
Conçu et mis au point par MDA, Dextre est un engin à deux bras de plus de 1.500 kilos. Il mesure 3,6 mètres de haut pour une envergure d'épaules de près de 2,4 mètres et peut se déplacer de façon autonome ou être transporté par les autres bras de la Station. Il peut également être fixé, à la demande, sur un des points de stabilisation répartis sur la Station. Il a pour fonction de réduire le nombre de sorties extravéhiculaires que doivent effectuer les astronautes pour l'entretien courant à l'extérieur de la station. Il sera utilisé pour enlever et remplacer de petits composants à l'extérieur de la Station, là où une manipulation de précision est requise. Sa première mission, prévue en février, consistera justement à extraire la plateforme externe du véhicule japonais HTV-2, un cargo spatial transportant du matériel.
Pour le Canada, véritablement à la pointe dans ce domaine, qui fournit également les bras robotiquesrobotiques et la perche d'inspection de la navette, Dextre n'est qu'une étape de plus menant au développement de bras autrement plus complexes, pour l'exploration robotique.

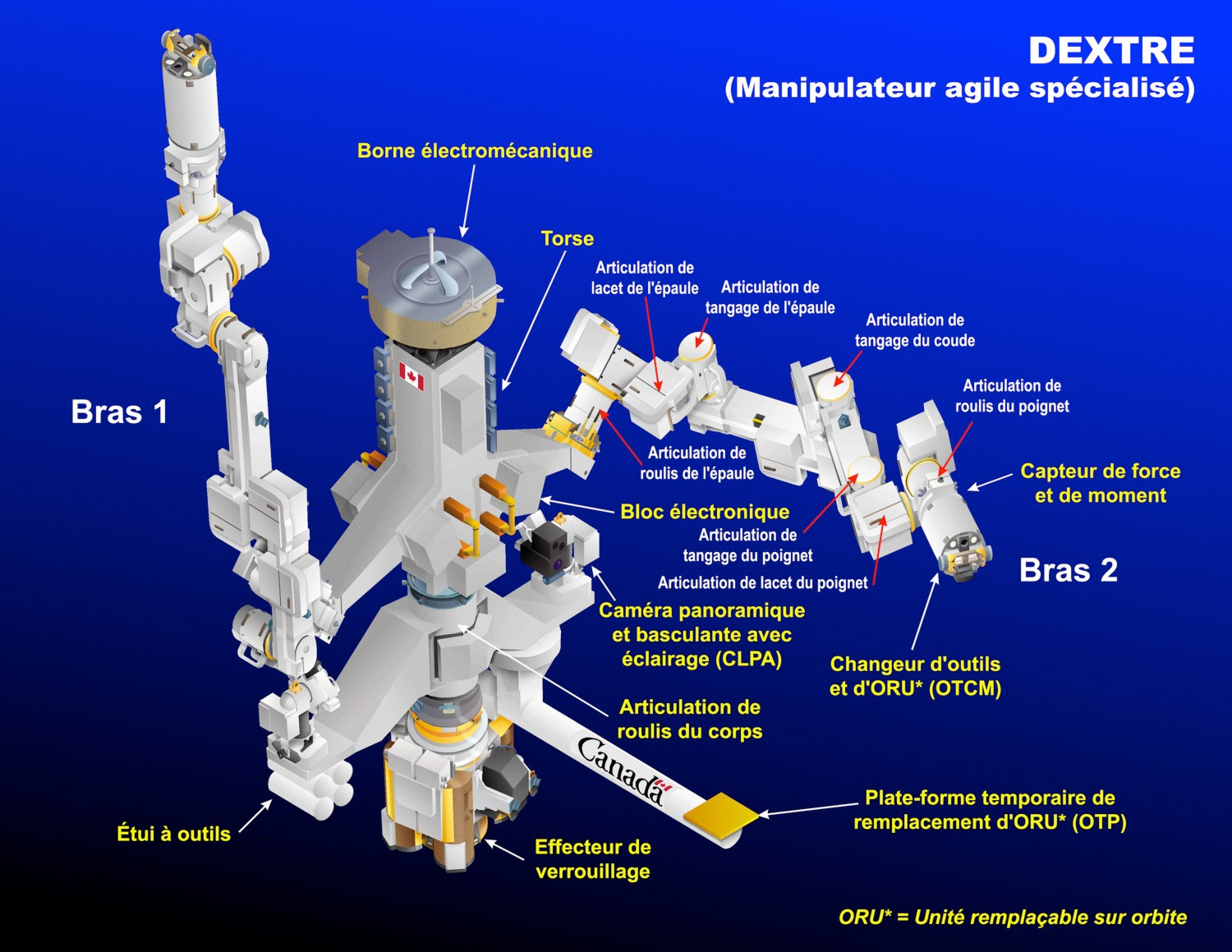
Schéma de composition de Dextre, la main robotique de la Station spatiale. © ASC
L'amélioration des robots en vue de futures missions spatiales
À mesure que les projets d'explorations humaines du Système solaire sont repoussés, les agences spatiales sont forcées de développer des systèmes robotiques de plus en plus sophistiqués, proches d'un comportement humain décuplé. Aujourd'hui, les robotsrobots envoyés dans l'espace ont pour seule fonction de transporter des instruments, certes de plus en plus puissants, mais pour la plupart inertes. Des sondes tournent autour de nombreux objets du Système solaire et d'autres se posent au sol et se contentent de transporter les instruments d'un point à un autre. À l'avenir, ce ne sera plus le cas. Les missions de retour d’échantillons vont devenir plus courantes et les agences spatiales devront préparer le terrain pour les premières missions humaines.
Des objectifs que prépare le Canada. Son agence spatiale, l'ASC, vient de financer un projet de bras robotique léger et polyvalent, ayant une longue portée, et pouvant être commandé à distance ou fonctionner en autonomieautonomie. Il pourrait être utilisé sur la Lune, Mars ou ailleurs. Le bras sera doté d'un ensemble d'outils d'exploration capables d'exécuter diverses tâches, notamment une petite pelle, des pinces de préhension et une clé à douilles électrique. Le prototype devrait être livré au début de 2012.


Les missions de retour d'échantillons martiens ou lunaires nécessiteront des bras robotiques capables de sélectionner un échantillon parmi d'autres, de le ramasser et de le transporter sur plusieurs mètres avant de le déposer dans le conteneur qui retournera sur Terre. À l'image, un concept de rover lunaire de la Nasa. © Nasa
Cette stratégie vise à faire du Canada un acteur incontournable dans le domaine de la robotique spatiale et un partenaire de premier choix pour les futures missions d'exploration vers la Lune et Mars. Les technologies mises en œuvre dans le cadre de ce projet pourraient également trouver diverses applicationsapplications sur Terre en faisant progresser l'autonomie des robots et la façon dont ils perçoivent le milieu non structuré qui les entoure.



 vient d'être livré à la Nasa. Transformé par Thales Alenia Space, il doit rejoindre la Station en novembre à bord de la navette Discovery. Il sera amarré au port Nadir du nœud de jonction numéro 1 (Unity). Crédit Nasa / Thales Alenia Space")














")





