

au sommaire
L'engin jaune s'enfonce dans le bleu et disparaît bientôt. Sur le bateau, les hommes semblent s'en désintéresser. Le sous-marin est désormais seul pour réaliser sa mission de surveillance et ne refera surface près du navire que d'ici à 24 heures, après avoir parcouru une centaine de kilomètres. À bord, il n'y a pourtant personne. « C'est un drone » résume Vincent Rigaud, directeur de l'Unité de recherche Systèmes sous-marins de l'Ifremer, à La Seyne-sur-mer. Ce genre d'AUV, pour Autonomous Underwater Vehicle, est en effet le pendant sous-marin des drones aériens. Ils sont autonomes, naviguent seuls près du fond, embarquent des instruments scientifiques et peuvent par exemple devenir cartographes.
Mais les AUV ne sont que quelques-uns des représentants d'un bestiaire en perpétuelle évolution : il y a aussi les ROV, les ROV hybrides, voire les gliders, et les sous-marins sont toujours là. On s'y perd un peu... « Ces appareils sont complémentaires, explique Vincent Rigaud. Le Nautile est un petit sous-marin habité (mis en service en 1984). Il descend jusqu'à 6.000 mètres et peut rester 8 heures sous l'eau, dont 4 heures au fond. Avec les bras télémanipulateurs, l'équipage peut prélever toutes sortes d'échantillons. C'est un engin d'exploration polyvalent, qui peut servir à la biologie, à la géologie ou à la recherche d'épaves. »


Le Nautile, sous-marin habité, sert à des missions très variées, mais sa mise en œuvre nécessite un navire de grande taille et des équipes qualifiées. © Ifremer
Au bout d'un câble
Un sous-marin comme le Nautile ne peut donc pas plonger très longtemps et revient cher à mettre en œuvre mais il peut faire des travaux qu'aucun robot ne sait faire. En revanche, les engins automatiques rendent d'autres services. Les ROV (Remoted Operated Vehicle) sont reliés au bateau par un long câble lui apportant l'énergieénergie et comportant aussi des fibres optiquesfibres optiques pour transmettre des données à haut débitdébit, permettant le pilotage en temps réel depuis le bateau. Pionnier du genre, le Victor 6000 peut plonger à 6.000 mètres, comme son nom l'indique, et rester jusqu'à trois jours au fond, au bout d'un câble de 8 kilomètres de longueur pour 20 millimètres de diamètre.
Cet engin imposant (3,3 mètres sur 2,1 mètres et 2,5 mètres de haut) qui pèse 4,6 tonnes est muni de deux bras télémanipulateurs et de caméras HD. « Le Victor 6000 pèse 4 tonnes et peut transporter 600 kilos de charge utile scientifique. » Caméras supplémentaires, aspirateuraspirateur à faune, panier, instruments de mesure..., les équipements peuvent largement varier d'une mission à l'autre, ce qui en fait un appareil polyvalent.


Le Victor 6000 est un ROV, c'est-à-dire un engin téléguidé. Il est piloté depuis le navire auquel il est relié par un câble, qui lui apporte aussi l'énergie. © Ifremer
Les AUV savent travailler seuls
Ce ROV vient de subir un carénagecarénage complet à La Seyne-sur-mer, où l'on conçoit de nouveaux engins mais où, également, on assure la maintenance de cette flotte sous-marine. L'opération est terminée et il sera dans son plus bel atour ce weekend, samedi 21 et dimanche 22 mai (et aussi vendredi pour les écoles), pour les journées portesportes ouvertes à La Seyne. « Des ROV scientifiques comme Victor 6000, il n'en existe que quelques dizaines dans le monde. En revanche, toutes missions confondues, ils sont plusieurs milliers dans le monde, dont plusieurs centaines dans le secteur du pétrolepétrole off-shoreoff-shore. »
Mais ces ROV ont un fil à la patte... « La tendance est d'aller dans le sens du découplage entre l'engin et le navire. Car c'est le bateau qui coûte cher, explique Vincent Rigaud. Nous cherchons à minimiser l'impact du coût du navire en utilisant des bateaux plus petits. » D'où les AUV, ces sortes de torpillestorpilles dont la manutention à bord pour la mise à l'eau est réduite et dont on ne s'occupe plus lorsqu'ils sont partis vivre leur vie sous-marine. AsterX et IdefX (qui seront ce weekend à La Seyne) sont de ceux-là. « Ils sont capables d'effectuer cent plongées par an, ce qui est beaucoup. »
Ces poissonspoissons de 4,5 mètres de long portent un compartiment à instruments à l'avant et peuvent naviguer à 5 nœudsnœuds (un peu plus de 9 kilomètres à l'heure). Ils sont idéaux pour faire de la cartographie des fonds. Avec leur centrale inertielle (que l'aéronautique a beaucoup utilisée), ils sont capables de suivre une route complexe. Par modemmodem acoustique, ils peuvent dialoguer avec un navire en surface. Ils peuvent aussi stationner sur le fond avant de reprendre leur chemin. « Avec le boom des recherches de ressources minérales sur le plancherplancher océanique et le besoin de connaître et de surveiller la biodiversité marine et les habitats marins, il y a actuellement une forte demande sur ce genre d'appareils pour des profondeurs importantes », confie Vincent Rigaud.
. Il n'est plus relié à l'équipage que par une liaison radio, en surface, et par un modem acoustique en plongée. Il n'y a pas de transmission d'images et l'engin doit être autonome. © Ifremer")

AsterX s'éloigne du navire (ici L'Europe). Il n'est plus relié à l'équipage que par une liaison radio, en surface, et par un modem acoustique en plongée. Il n'y a pas de transmission d'images et l'engin doit être autonome. © Ifremer
Des poissons agiles mais qui manquent de bras
L'autonomieautonomie est un point crucial et tout est bon pour l'augmenter. Idefx, qui fonctionnait sur batterie, vient d'être équipé d'une pile à combustiblepile à combustible, alimentée par un réservoir d'hydrogènehydrogène. De 100 kilomètres, l'autonomie est passée à 300 ! Mais ce progrès a un prix : la complexité du remplissage de ce réservoir. « Nous l'avons fait sur un bateau, nous dit Vincent Rigaud. C'est donc possible. Mais il faut un personnel très qualifié et l'opération est délicate. » Ce qui ne convient donc pas encore à un engin destiné à être manœuvré sur une embarcation quelconque et avec tout type de personnel.
Une autre voie pour faire mieux... en supprimant l'hélice ! Bien connu, ce principe est celui des « gliders », c'est-à-dire, en français, des planeursplaneurs. Un ballast fait varier la flottabilitéflottabilité en déplaçant de l'huile entre des compartiments isolés ou non de la pressionpression extérieure. En déplaçant le centre de la gravitégravité (également à l'aide d'un mouvementmouvement d'huile), on peut faire pivoter le neznez vers le bas ou vers le haut, ou bien incliner l'engin vers la droite ou vers la gauche. Le glider est muni de surfaces portantes (les ailes), comme un avion (ou plutôt un planeur). Il peut ainsi évoluer à petite vitessevitesse dans toutes les directions. Un peu d'électricité suffit pour le pilotage, la communication des données et le positionnement par satellite quand l'engin revient en surface. Leur autonomie atteint trois mois...
Le défaut de ces poissons est de n'embarquer que peu de charge utile, mais aussi de manquer de bras... Hormis les mesures effectuées avec des capteurscapteurs, leur capacité d'intervention est nulle. C'est là un domaine de recherche actuel. « Nous travaillons sur des ROV hybrides, ou H-ROV, rapporte Vincent Rigaud. Disons que ce sont des ROV, donc avec des bras et un câble. Mais si ce câble casse, par exemple, ils continueront à travailler, sans utiliser les bras mais en se contentant d'effectuer les mesures avec les capteurs. »

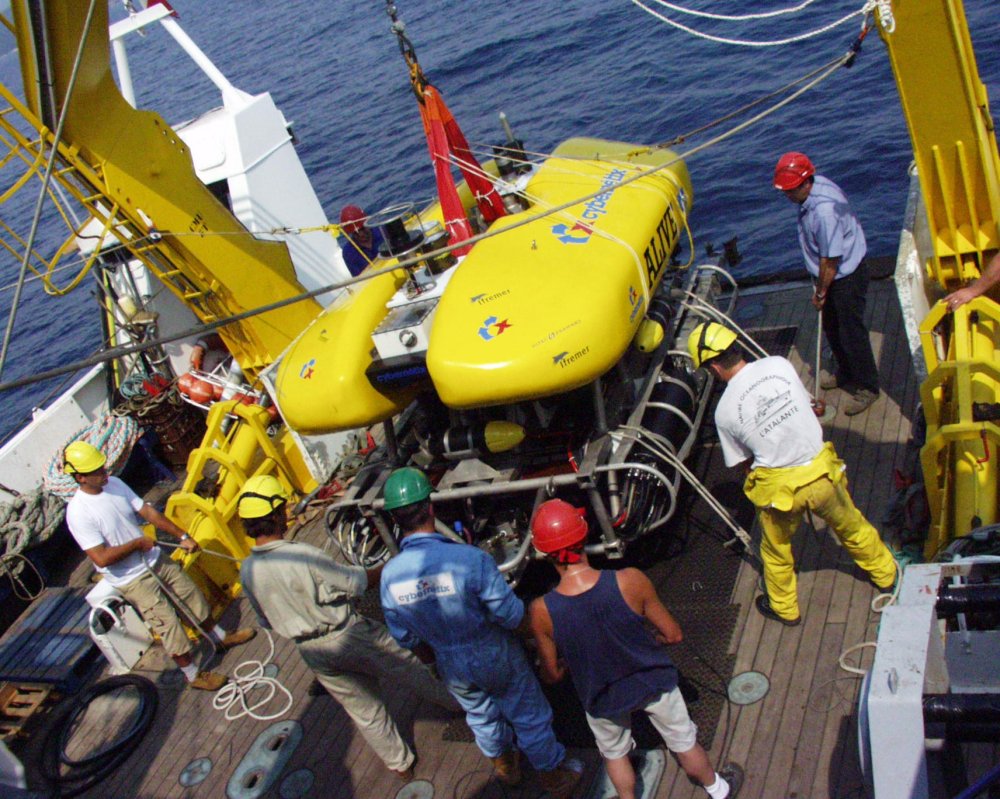
L'AUV Alive, expérimental, est plus autonome que ses prédécesseurs. Il peut par exemple intervenir seul sur une tête de puits de pétrole pour manœuvrer une vanne. © Ifremer
Un peu d'intelligence à bord
Il faut comprendre en effet combien un échange de données à haut débit est nécessaire pour que des hommes, là-haut, puissent manipuler les bras en regardant des vidéos en temps réel. La fibre optique le permet mais pas les modems acoustiques. Reste une autre solution : une « intelligenceintelligence » à bord. C'est aussi un domaine actif pour les ingénieurs aujourd'hui. Capable d'analyse d'image, l'ordinateurordinateur-pilote peut assurer un programme assez précis, comme couper un câble.
L'Ifremer et des partenaires industriels ont développé deux engins expérimentaux de ce genre, Alive et Swimmer. « Sur un site pétrolier off-shore, on peut leur commander de manœuvrer une vanne sur une tête de puits. En autonomie complète, l'engin s'en approche, actionne ses projecteursprojecteurs, repère la vanne, la saisit et la tourne. Alive l'a déjà fait... »
Bien sûr, il faudra très longtemps avant qu'un Alive géologuegéologue décide de lui-même quel caillou il est intéressant de ramasser. La complémentarité entre engins habités, ROV téléguidés, AUV sans bras, gliders légers et AUV robotisés reste donc indispensable.











")












