
au sommaire
. © Ludovic Godard - UFC")
. © Ludovic Godard - UFC")
Le robot endoscopique a été développé dans le cadre du projet µRALP (Microtechnologies and Systems for Robot-Assisted Laser Phonosurgery). © Ludovic Godard - UFC
La chirurgie des cordes vocales concerne les lésions cancéreuses, essentiellement liées au tabac (3.000 nouveaux cas par an), mais aussi, de plus en plus souvent, des lésions bénignes chez les personnes qui sollicitent beaucoup leur voix. Pour garantir la préservation de la voix du patient, elle nécessite une précision de l'ordre de 50 à 100 micromètresmicromètres (environ le diamètre d'un cheveu).
Or, à l'heure actuelle, la chirurgie utilise un laserlaser dont la source est située à 40 centimètres de la bouche du patient, ce qui limite sa maniabilité et la précision du geste. Par ailleurs, le chirurgien opère à travers un microscopemicroscope, et le tissu à traiter doit donc être dans le champ de visée, ce qui implique une position très inconfortable pour le patient, source de douleurs cervicales post-opératoires.
Pour pallier ces inconvénients, le projet européen μRALP, porté par l'institut italien des Technologies, qui associe entre autres l'institut FEMTO-ST et le CHRU de Besançon, développe un robotrobot dédié à la chirurgie assistée des cordes vocales.
 sont à l'intérieur du larynx. © Domaine public")
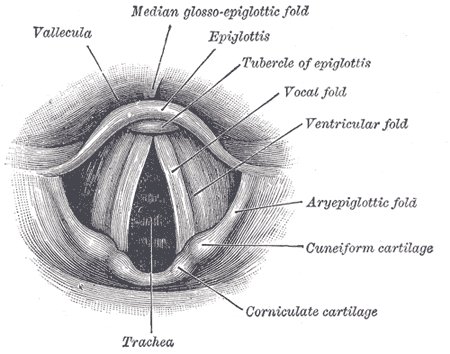
Les deux cordes vocales (vocal folds sur ce schéma) sont à l'intérieur du larynx. © Domaine public
Le micro-robot guidera les lasers
Ce nouveau dispositif consiste en un endoscope flexible qui permet de visualiser les cordes vocales et d'amener la source laser à l'intérieur du patient, à 20 millimètres de sa cible. Véritable défi microtechnique, l'endoscope proposé embarque des éclairages en lumièrelumière froide, deux caméras miniatures pour assurer une vision en 3D, un laser chirurgical doublé d'un laser qui fait office de pointeur pour le chirurgien, et enfin, le micro-robot de 1 cm3 qui va, grâce aux images fournies par les caméras, guider ces lasers le long de la trajectoire de référence dessinée par le chirurgien directement dans l'image à l'aide d'une tablette tactile.
Grâce à une technique de fluorescence, des filtres aideront à déterminer s'il existe une zone cancéreuse au niveau de la lésion et augmenteront la précision du geste. Avec ce nouveau procédé, le chirurgien devrait obtenir une précision de l'ordre d'une centaine de micromètres.
Après de nombreuses étapes techniques de recherche et de développement, des essais précliniques sont effectués sur des cadavres à l'institut d'Anatomie de l'université de Franche-Comté pour la validation du concept du prototype actuel. Les essais de ce jour portent sur l'insertion de l'endoscope, la visualisation 3D, l'ergonomie du poste de travail et le guidage laser.
À terme, ce dispositif médical apportera une véritable valeur ajoutée à la phonochirurgie, la chirurgie de la voix. En outre, les dispositifs conçus dans le cadre du projet μRALP pourront être utilisés dans d'autres systèmes robotiques chirurgicaux. Ainsi, l'institut FEMTO-ST et le CHRU travaillent déjà à la conception d'un endoscope pour la micro-chirurgie laser du tube digestiftube digestif.

par CNRS
le 24 février 2015


 ou d'ouvrir le corps du patient afin de pouvoir visualiser d'autres régions du corps (laparoscopie par exemple). Ainsi, les endoscopes ont des formes et des tailles différentes en fonction de leur utilisation. Mais bientôt, il pourrait devenir encore bien plus fins. © National Cancer Institute, Wikipédia, DP")




















