

au sommaire
- Découvrez HRP-2, le robot humanoïderobot humanoïde franco-japonais

Si dans Star Wars, les grains de sablesable ont tendance à gripper les mécaniques de C3PO, il parvient tout de même à se déplacer, quoique péniblement, dans les dunes de sable de la planète Tatooine. Voilà pour la science-fiction.... Dans la réalité, il en est tout autrement. S'il se hasarde à une balade sur une plage de sable, Asimo, le fameux robot humanoïde de Honda, va choir dès les premiers pas... Car les robots humanoïdes, autrement dit, bipèdes, sont pour le moment incapables de marcher sur une surface meuble quelle qu'elle soit. La faute aux accéléromètres situés dans les pieds du robot qui délivrent au programme gérant la stabilité de la machine des informations ambiguës. Le logiciel est en effet conçu pour que le pas suivant soit effectué sur une surface dure. Si le sol est meuble, les informations transmises par les accéléromètres indiquent que les pieds sont instables. Pour compenser le robot réalise des mouvementsmouvements absurdes avant de perdre rapidement l'équilibre et de tomber.
Curieusement, aucune étude sur le sujet n'avait encore été réalisée. Parmi leurs nombreuses recherches sur la robotique, les chercheurs dirigés par Shunsuke Komizunai de l'université de Tohoku à Sendai, au Japon, ont donc planché sur la question.
Selon l'équipe, ce problème est complexe et dans leur présentation, Shunsuke Komizunai et ses chercheurs le confirment en expliquant que : « La plupart des études pour la marche des robots bipèdes ont été effectuées sur des surfaces dures. Faire marcher un robot bipède sur un sol meuble comme le sable est très difficile ».

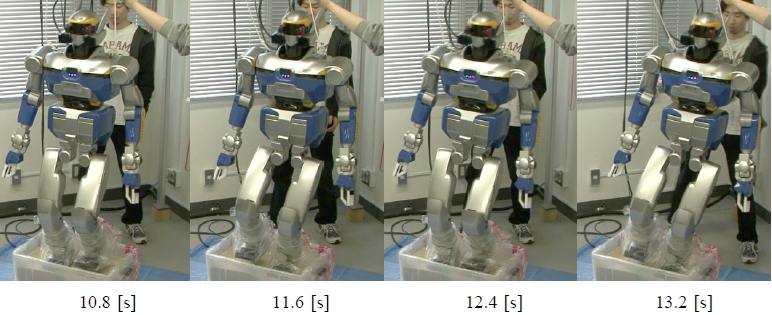
Pour un humain, marcher dans le sable est un exercice naturel, quoique un peu pénible à la longue, et pourtant cela relève de l’exploit pour un robot bipède. Lors des simulations informatiques, les chercheurs de l’université de Tohoku à Sendai au Japon y parviennent pourtant. Toutefois, lors des expérimentations, ce robot a perdu l’équilibre au bout de quelques pas. © Université de Tohoku
Les chercheurs ont d'abord identifié l'enfoncement d'un pied dans le sable. Pour cela, ils ont créé un pied de la même taille que celui d'un humain, l'ont posé dans un bac de sable et lui ont appliqué plusieurs niveaux de force pour simuler différents poids. Ensuite, ils ont recherché comment les systèmes d'équilibrage du robot pouvaient compenser les caractéristiques inhabituelles du sable.
L'algorithme de la marche du robot modifié en fonction du sol
Puis, ils ont créé un simulateur informatique capable de prédire le comportement d'un robot bipède sur la terre meuble. L'algorithme qui permet au robot de conserver l'équilibre sera modifié en fonction de la nature du sol : il calculera l'enfoncement théorique du pied. Lorsque le pied s'enfoncera véritablement dans le sable, il comparera sa position avec celle qu'il avait préalablement définie. Selon Shunsuke Komizunai et son équipe, « le simulateur fonctionnait correctement et le robot vacillait pour maintenir son équilibre et ne pas tomber à chaque pas ».
Toutefois, une expérience grandeur nature a été menée avec un véritable humanoïde dans un bac de sable. Il a fini par perdre l'équilibre au bout de quelques pas. Les chercheurs sont pourtant convaincus d'être sur la bonne piste. Il leur reste cependant à répéter et réussir ces expérimentations en situation réelle. En attendant, c'est à partir de ces résultats présentés lors d'une conférence internationale sur la dynamique des fluides, que l'équipe peut déjà ajuster son algorithme pour qu'il puisse adapter la marche sur différents types de sable ou de terre meuble. « Si l'on y parvient, le robot pourrait alors devenir utile pour un grand nombre d'activités » souligne Shunsuke Komizunai, sans préciser desquelles il pourrait s'agir.
Et pourquoi ne pas faire un tour dans les dunes d'une planète lointaine ?

par Sylvain Biget, Futura
le 6 janvier 2012














. La nouvelle génération de ce robot vient d’être présentée à New York. © Vanillasse, Wikimedia Commons, cc by sa 3.0")

. © Dall.E")






