

au sommaire
En mai 2010, le Français Magpier a gagné une course lors d'une compétition internationale. Le chrono était remarquable, réduisant de près de moitié le temps du précédent record. Magpier remportait ainsi brillamment l'épreuve baptisée Two-Millimeter Dash, ce que l'on pourrait traduire par Sprint des deux millimètres. Cette rencontre mondiale était organisée à Anchorage (Alaska) par le Nist (National Institute of Standards and Technology).
C'est en effet la distance que devaient parcourir les microrobots engagés dans cette compétition lilliputienne. La dimension d'un microrobot se mesurant par définition en microns (ou micromètresmicromètres), la distance est raisonnable mais n'a rien d'un marathon. C'est bien d'un sprint qu'il s'agit. Magpier mesurait 300 microns de côté et était entraîné par une équipe française du CNRS, venue de l'Isir (Institut des systèmes intelligents et de robotique), du Femto-ST (institut Franche-Comté Électronique mécanique thermique et optique - Sciences et technologies) et du Laboratoire de photonique et de nanostructures. Développé lors du projet MicroPads, Magpier a été spécialement conçu pour la compétition du Nist.
 pour sa victoire lors de la compétition <em>Two-Milllimeter Dash</em>. Dans un peu plus d'un mois, le champion remettra son titre en jeu. © Isir/Femto-ST")

Une récompense très officielle pour l'équipe française (The French Team) pour sa victoire lors de la compétition Two-Milllimeter Dash. Dans un peu plus d'un mois, le champion remettra son titre en jeu. © Isir/Femto-ST
Le résultat est sans appel : Magpier, pour Magnetic-piezoelectric microrobot, a franchi ces deux millimètres en 28,1 millièmes de seconde, contre 54 millièmes de seconde pour le précédent détenteur du record (l'équipe de l'Université américaine Carnegie Mellon). En convertissant en unités de vitessevitesse habituelles, on obtient des performances apparemment très modestes : 0,071 mètre par seconde, ou 0,26 kilomètre par heure.
Pourtant, ce record est considéré avec respect, tant la conception des robots miniatures, « micros » ou « nanos », soulève aujourd'hui des difficultés considérables et constitue un enjeu majeur. L'un des membres de l'équipe, Stéphane RégnierStéphane Régnier (Isir), nous l'explique en détail dans un dossier de Futura-Sciences traitant de la manière dont les chercheurs s'emploient à « interagir avec le nanomonde ».
 présente une surface de 388 x 300 micromètres carrés, contre 388 x 388 pour le plus grand. La hauteur des deux est de 224 micromètres. © Isir/Femto-ST")
Deux exemplaires de Magpier. Le plus petit (à gauche) présente une surface de 388 x 300 micromètres carrés, contre 388 x 388 pour le plus grand. La hauteur des deux est de 224 micromètres. © Isir/Femto-ST
Vaincre les frottements
Magpier est contrôlé à distance. C'est donc davantage un engin télécommandé qu'un robot autonome. Ce parallélépipède est constitué d'une superposition de deux couches de matériaux, l'un est conducteur (du nickelnickel) et l'autre piézoélectriquepiézoélectrique, c'est-à-dire capable de se déformer sous l'effet d'une tension électrique. L'engin se déplace sous le double effet d'un champ magnétiquechamp magnétique et d'un champ électriquechamp électrique externes, l'un permettant de le soulever et l'autre de le bouger.
Comment avance-t-il ? Sous l'effet du champ électrique, Magpier oscille verticalement, comme s'il sautait sur place. Quand il est décollé de la surface, le champ magnétique suffit à le déplacer. Selon l'équipe, ces bonds - qui n'ont pas pu être observés - sont de quelques fractions de micron de hauteur.
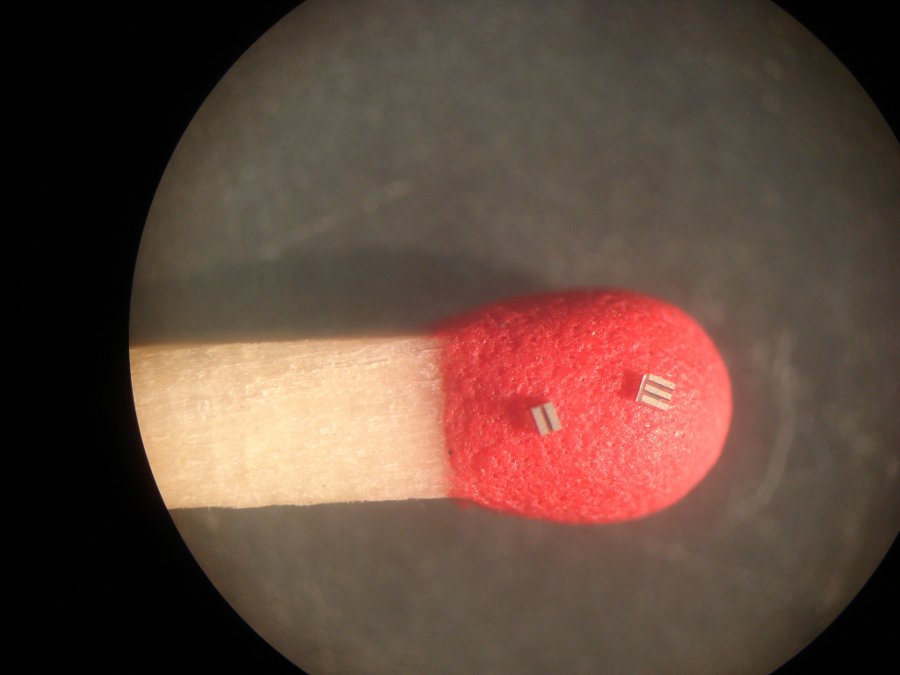
 est faite de nickel (pour ses propriétés ferroélectriques) et mesure 24 micromètres d'épaisseur. Elle repose sur un matériau piézoélectrique (PMN-PT), de 200 micromètres d'épaisseur. © Isir/Femto-ST")
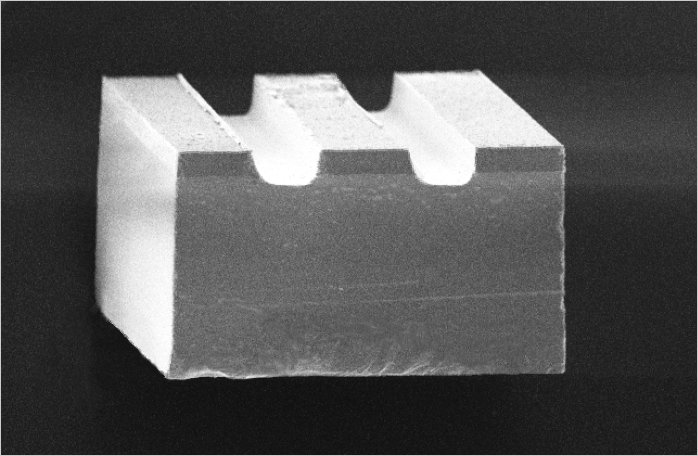
Magpier vu de près. La partie supérieure (ici creusée de deux sillons) est faite de nickel (pour ses propriétés ferroélectriques) et mesure 24 micromètres d'épaisseur. Elle repose sur un matériau piézoélectrique (PMN-PT), de 200 micromètres d'épaisseur. © Isir/Femto-ST
Cette solution peut surprendre. Ne pas chercher l'analogieanalogie avec notre universunivers quotidien... Comme l'explique Stéphane Régnier dans son dossier, le monde des microrobots n'est pas le nôtre et les forces en présence diffèrent notablement. La première d'entre elles est le frottement, qui est redoutable.
« Il faut tenir compte des forces électrostatiquesélectrostatiques, de capillaritécapillarité ou de van der Waals, nous explique Ioan Alexandru Ivan, un chercheur roumain, membre de l'équipe Femto-ST, avec Joël Agnus. Magpier adhère tellement à la surface que si l'on retournait le dispositif, il pourrait y rester collé ».
En décollant périodiquement le petit robot, un champ magnétique relativement faible suffit à le déplacer et on peut le diriger en contrôlant l'orientation de ce champ magnétique. Sans ces bonds, il faudrait un champ bien plus intense.
 est vertical et génère de brutales déformations périodiques dans le matériau piézoélectrique, qui ont pour effet de le faire sautiller. Le champ magnétique (<em>B-field</em>) sert, lui, à déplacer Magpier. © Isir/Femto-ST")
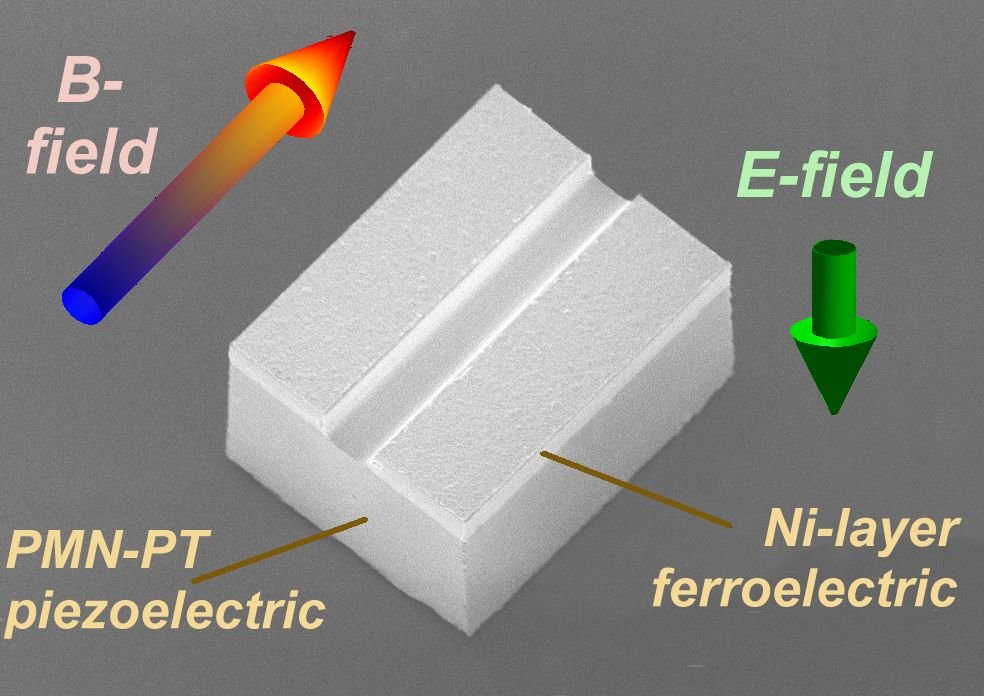
Le petit engin est guidé de l'extérieur par un champ électrique et un champ magnétique. Le premier (E-field) est vertical et génère de brutales déformations périodiques dans le matériau piézoélectrique, qui ont pour effet de le faire sautiller. Le champ magnétique (B-field) sert, lui, à déplacer Magpier. © Isir/Femto-ST
Un monde à découvrir
À quoi peut-il servir ? Pour l'instant, à rien... Magpier n'est pas le prototype d'un système qui sera utilisé un jour. Mais il montre à quoi pourraient ressembler des systèmes miniaturisés qui seront utilisés à l'avenir dans de multiples domaines. « Des robots de ce genre pourraient par exemple fabriquer des Mems (MicroElectroMechanical SystemsMicroElectroMechanical Systems) », estime Ioan Alexandru Ivan. Ces dispositifs micromécaniques, dont les dimensions se mesurent en dizaines ou en centaines de micron, appartiennent à un domaine encore balbutiant, où on en est encore à trouver le bon lubrifiant...
Des engins capables de se mouvoir dans un liquideliquide feraient de bons candidats pour des véhicules minuscules capables de se glisser dans des veines en portant des médicaments ou un instrument chirurgical. Un appareil beaucoup plus grand, baptisé ProteusProteus, a déjà été étudié, ouvertement inspiré d'un ouvrage de science-fiction porté à l'écran (Le voyage fantastique). « Une société suisse, Aeon, commercialise déjà des robots miniatures capables d'explorer leur environnement dans les trois dimensions » rappelle Ioan Alexandru Ivan.
, quatre pistes pour les coureurs (<em>chip with four playing fields</em>). Des connecteurs entourent l'ensemble, notamment pour contrôler l'humidité (à gauche) et injecter de l'azote (en bas). © Nist")

Le champ de course de la compétition. On remarque, sous la surface vitrée (removable glass cover), quatre pistes pour les coureurs (chip with four playing fields). Des connecteurs entourent l'ensemble, notamment pour contrôler l'humidité (à gauche) et injecter de l'azote (en bas). © Nist
À l'échelle des micromètres et des nanomètresnanomètres, c'est un nouveau monde qui s'ouvre, où les ingénieurs, les électroniciens et les mécaniciens doivent apprendre de nouvelles règles et inventer d'autres logiques. Magpier, comme Proteus, et bien d'autres curiosités comme, côté nanorobots, les boîtes en ADN, ne sont que des pionniers, comme les premiers aéroplanes.
Le sprinteur Magpier aura tout de même un successeur, en cours d'élaboration car l'équipe compte bien remettre son titre en jeu à la prochaine compétition qui aura lieu au mois de mai à Shanghaï. Magpier 1, lui, sera conservé... au musée du temps, à Besançon.
























