

au sommaire

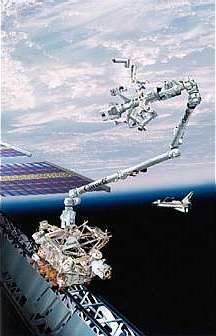
Le bras manipulateur européen en fonctionnement (vue d'artiste)
Cet instrument est construit sous maîtrise d'oeuvre de la société néerlandaise Dutch Space, faisant partie du groupe EADSEADS Space. Ce que l'on sait moins, c'est que l'ERA a été conçu à l'origine vers la fin des années 80 pour équiper la navette HermèsHermès. A l'abandon du programme, il a ensuite été adapté pour être transporté par le Shuttle, puis finalement, s'est retrouvé partie intégrante du module russe.
Le bras ERA, d'une masse de 630 kgkg, se déploie sur une longueur de 11,3 mètres et est capable de déplacer jusqu'à 8 tonnes à une vitesse maximale de 10 cm/seconde. Mais ce qui fait son originalité est son caractère ambidextre. Muni à chaque extrémité d'une "main" équipée des mêmes senseurssenseurs et connecteurs électriques, il peut se positionner indifféremment d'un côté ou de l'autre, dénommés "main" et "épaule". Cependant, il ne peut entrer en action que s'il est fixé sur un des supports du MLM.

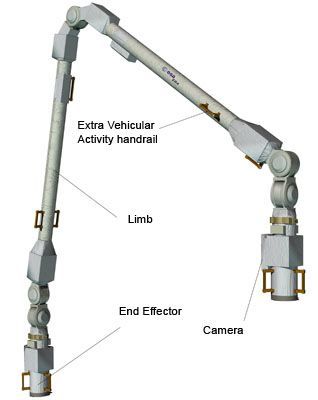
Principe de l'ERA
Une autre caractéristique d'ERA, peut-être la plus remarquable, est son automatisation poussée à l'extrême, ce qui en fait le bras manipulateur le plus évolué de l'ISS. Il pourra être commandé indifféremment depuis le module Zvezda par un occupant de la station au moyen d'un PCPC muni du logiciellogiciel IMMI (Internal Man Machine Interface), mais aussi par un astronaute en sortie extravéhiculaire via le pupitre externe EMMI (External Man Machine Interface). Il sera utilisé à l'entretien des batteries solaires, à la manutention d'éléments (installation, remplacement), au contrôle visuel des parois extérieures de la station, et à bien d'autres tâches selon le besoin. Il est aussi appelé à jouer un rôle-clé dans la suite de l'assemblage de l'ISS.


Modèle de vol de l'ERA
La société belge d'ingénierie informatique Spacebel participe au développement de l'équipement au sol de l'ERA, plus particulièrement du simulateur permettant aux astronautes de s'entraîner à sa manipulation à terre (Mission Planning and Training Equipment - MPTE). Elle a aussi développé un simulateur simplifié qui sera embarqué dans la Station Spatiale Internationale (Refresher Trainer equipment - RTR), qui permettra aux astronautes de parfaire leur entraînement à bord et de mettre au point diverses stratégies d'intervention en cas de situation imprévue.
 à Noordwijk, (Pays Bas)")

Simulateur du bras ERA installé dans les locaux de l'ESTEC (European Space Research and Technology Centre) à Noordwijk, (Pays Bas)
Le lancement du module MLM équipé du bras ERA est prévu pour novembre 2007 au moyen d'une fuséefusée Proton depuis le cosmodrome de BaïkonourBaïkonour (Kazakhstan).

par Jean Etienne, Futura
le 10 octobre 2006
")





. Ce bras, clairement visible à droite de l'image est installé sur le segment russe de la Station spatiale. © Nasa")

 du 24 au 26 octobre 2017. © Rémy Decourt")
 en vue d'un essai acoustique.")






, au-dessus du lac Svityaz, en Ukraine. © Ihor Khomych, via Spaceweather")






